The Qualcomm IM SDK GStreamer plugins interact with Qualcomm IM SDK multimedia components to build multimedia or AI/ML use cases.
The Qualcomm IM SDK hides the complexity of the hardware within the plugin architecture and provides APIs to applications. Using this framework, you can create applications without accessing low-level platform libraries and hardware details, which can vary across platforms.
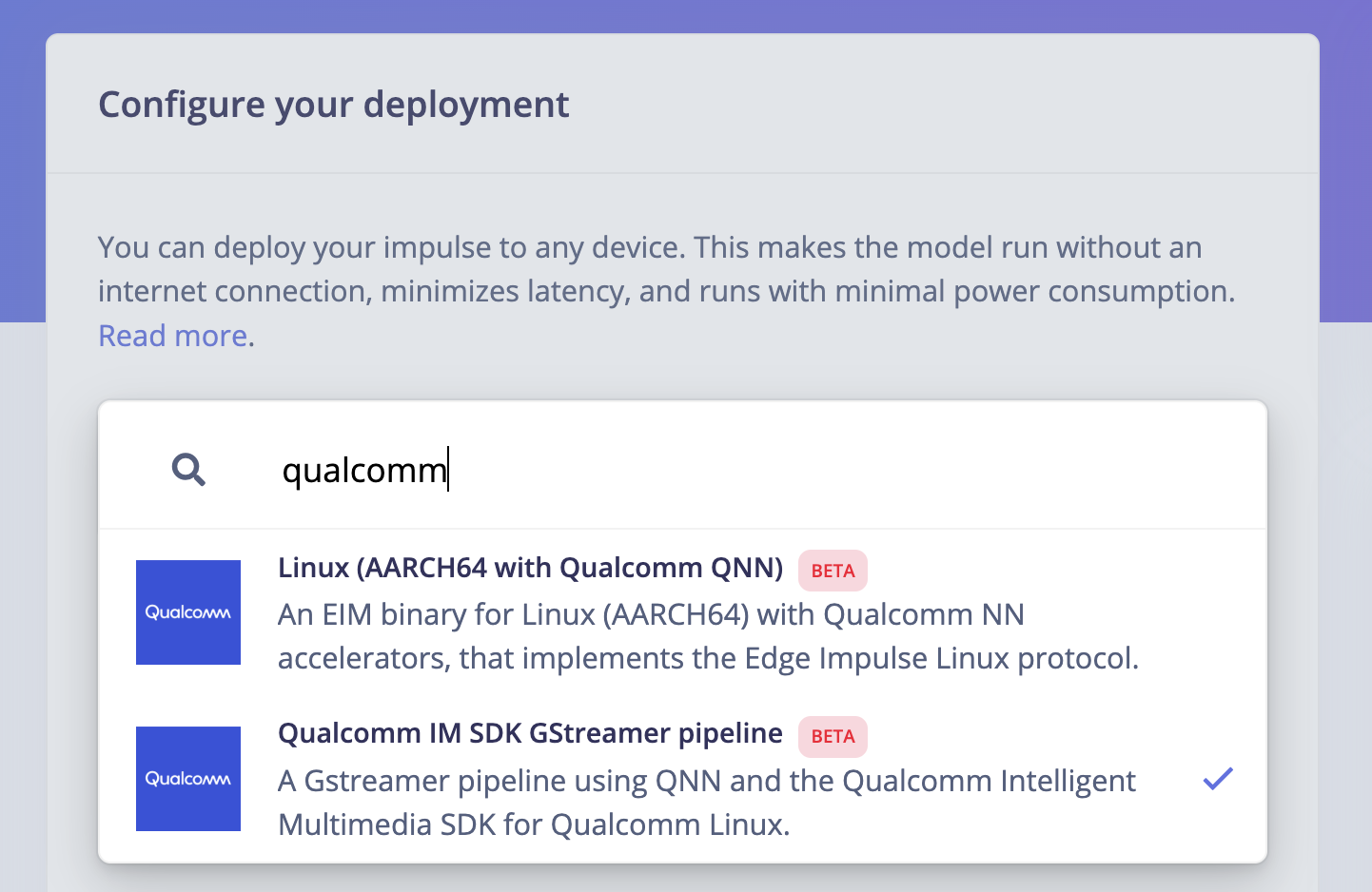
You can select the Qualcomm IM SDK GStreamer pipeline deployment option directly in your project’s Deployments page:
Only YOLO-based models are supported using this deployment option.
.zip folder with a directory structure like the following:
.
├── README.md
├── bin
│ └── edge-impulse-object-detection
├── edge-impulse-object-detection-config.json
├── imsdk-demo-app
│ ├── CMakeLists.txt
│ ├── Dockerfile
│ ├── README.md
│ ├── build.sh
│ ├── include
│ │ ├── gst_sample_apps_pipeline.h
│ │ └── gst_sample_apps_utils.h
│ └── source
│ ├── gst_sample_apps_utils.c
│ └── main.c
├── model.labels
├── model.tflite
├── run-camera-pipeline.sh
└── run-file-pipeline.sh
5 directories, 15 files
Gstreamer pipeline using a camera
Start via:
This renders both the camera feed from the RB3’s built-in camera plus the inference result (bounding boxes) to the screen connected over HDMI.
Gstreamer pipeline using a video file
Start via:
./run-file-pipeline.sh --in-file myvideo.mp4 --out-file myvideo-annotated.mp4
Prebuilt edge-impulse-object-detection demo app
Run the application via:
export XDG_RUNTIME_DIR=/dev/socket/weston && export WAYLAND_DISPLAY=wayland-1
./bin/edge-impulse-object-detection --config-file=edge-impulse-object-detection-config.json
Custom application with the IM SDK C++ SDK
We’ve included a demo application based on gst-ai-object-detection in imsdk-demo-app/. To build:
-
Build the application (will be built using Docker):
cd imsdk-demo-app
sh build.sh
-
Run the application:
export XDG_RUNTIME_DIR=/dev/socket/weston && export WAYLAND_DISPLAY=wayland-1
# make sure to go back to the root folder
cd ..
./imsdk-demo-app/build/edge-impulse-object-detection --config-file=edge-impulse-object-detection-config.json
Additional resources