Installing dependencies
Follow Advantech’s setup instructions to configure, connect, power up, and discover your ICAM-540. You may also need to purchase a camera lens that is appropriate for your application. You will need to connect power, keyboard, mouse, HDMI monitor, and the Ethernet connector. The initial/first boot-up of the ICAM-540 can take awhile so be patient… once it comes up and is ready, you will see a ubuntu desktop that you are logged into already (initial username/pw: icam-540/icam-540). You should change the password to something unique.Advantech ICAM-540 OS Setup/Update
First, lets update the underlying OS:Disable the CamNavi Service
By default on a fresh install, the ICAM-540 has a service that captures and controls the camera. For Edge Impulse, we need to stop and disable that service before we can continue:Camera sensor setup
At fresh start the camera sensor initializes with default image parameters (e.g., gain, exposure, etc.). Most of the times the default parameters will not be suitable for the setting that you want to observe. One solution is to set up a camera with Basler Pylon Viewer visual tool, and save the camera sensor parameters for further use. Pylon Viewer comes preinstalled on ICAM-540. First, launch the pylon Viewer tool from Basler: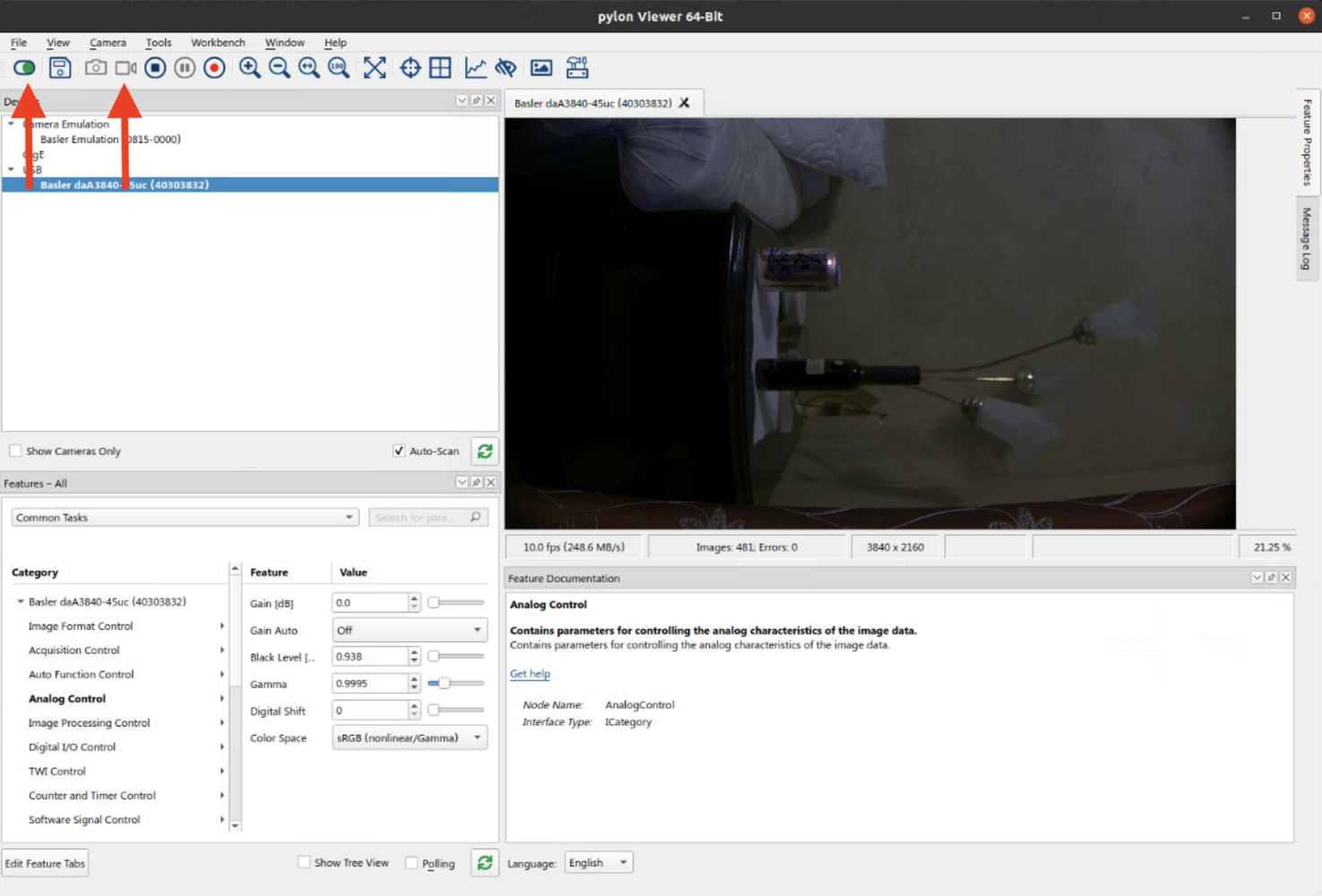
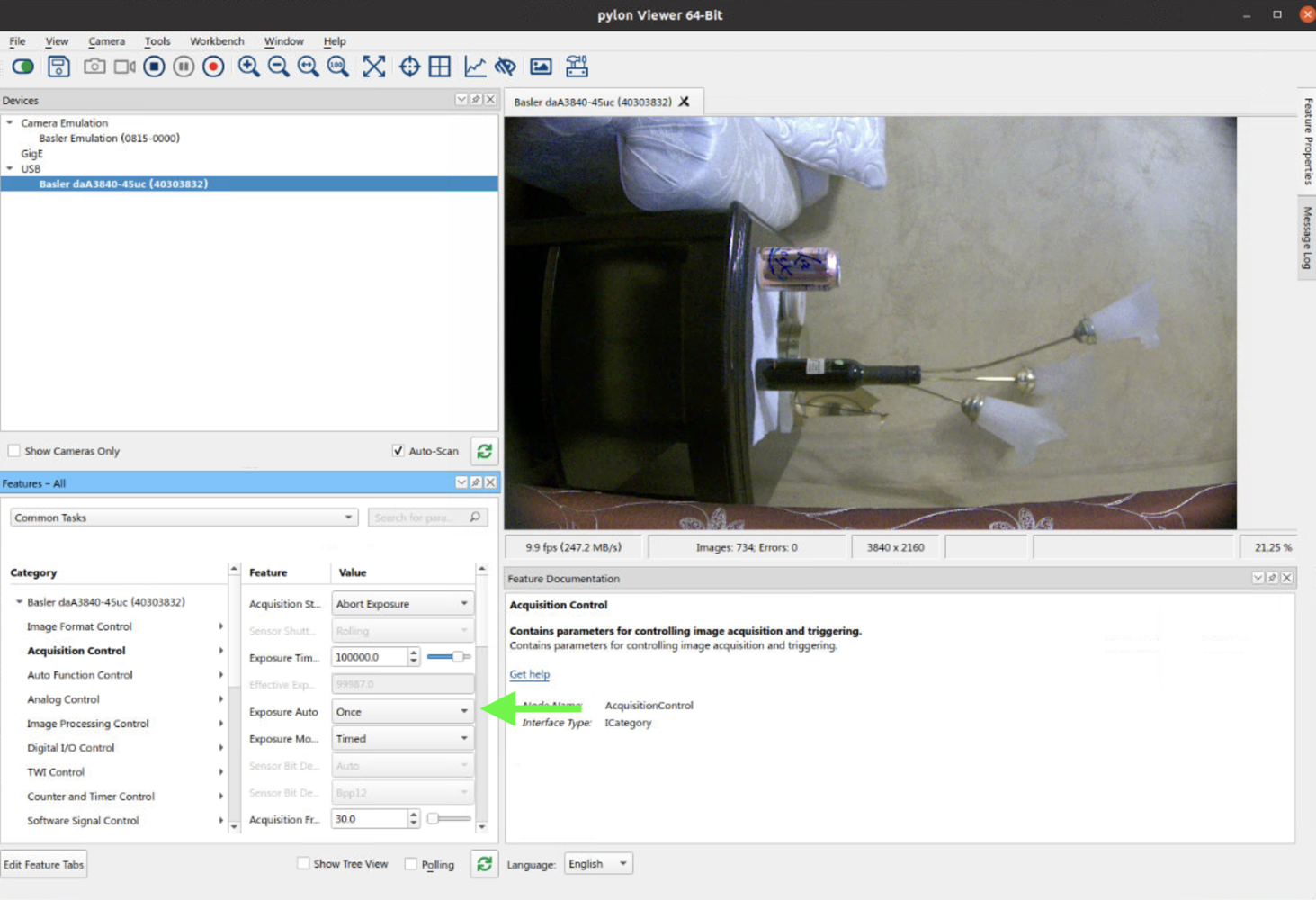
.pfs format for further reuse.
To do that:
- Pause the stream by clicking on the “stop” icon
- Open “Camera” menu on the top menu and click “Save Features”
- Save the file in a filesystem path. It is recommended to create a directory for these configurations, e.g.,
/home/icam-540/basler-configs
Refer to Basler pylon Viewer documentation for more settings and usage tips
Running the setup script
To set this device up in Edge Impulse, run the following command (from any folder). When prompted, enter the password you created for the user on your ICAM-540 during the “Installing dependencies” section. The entire script takes a few minutes to run.Connecting to Edge Impulse
With camera settings configured and assuming they are saved in e.g.,/home/icam-540/basler-configs/config-1.pfs, run the following command:
Next steps: building a machine learning model
With everything set up you can now build your first machine learning model with these tutorials: Looking to connect different sensors? Our Linux SDK lets you easily send data from any sensor and any programming language (with examples in Node.js, Python, Go and C++) into Edge Impulse.Deploying back to device
To run your impulse locally stop any previous Edge Impulse commands (CTRL+C) and run the following with the camera configurations you prefer (see above for info on camera configuration).
.eim file to the device’s file system and run this command on the device
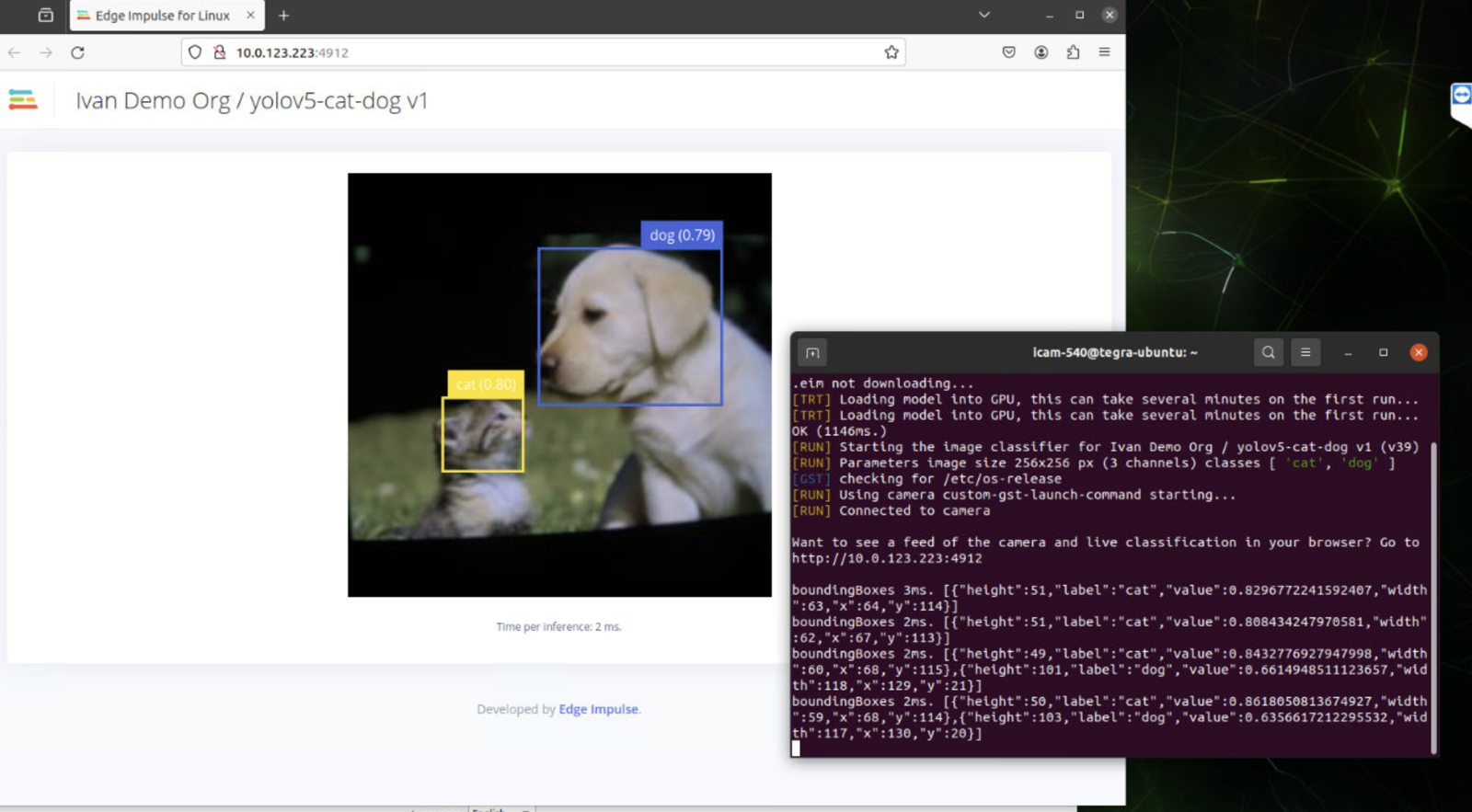
View inference in web browser
If you have an image model then you can get a peek of what your device sees by being on the same network as your device, and finding the ‘Want to see a feed of the camera and live classification in your browser’ message in the console. Open the URL in a browser and both the camera feed and the classification are shown: