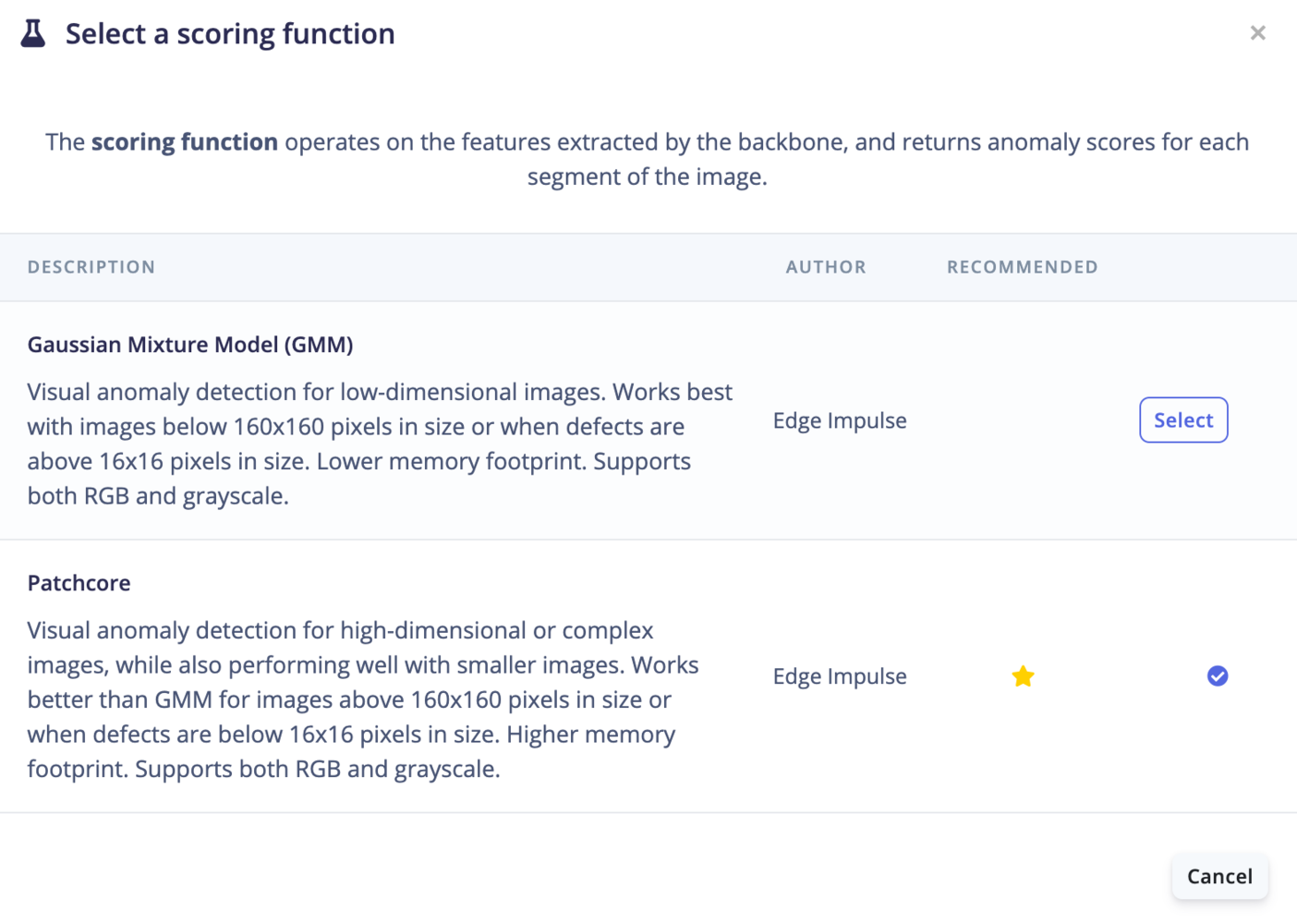
Selectable scoring functions for Visual Anomaly Detection
Scoring functions
PatchCore
PatchCore is an unsupervised method for detecting anomalies in images by focusing on small regions, called patches. It first learns what “normal” looks like by extracting features from patches of normal images using a pre-trained neural network. Instead of storing all normal patches, it creates a compact summary (core-set) of them to save memory. When a new image is checked, PatchCore compares its patches to this core-set. If a patch significantly differs from the normal ones, it’s flagged as an anomaly. The system can also pinpoint where the anomaly is and assign a score to measure its severity. This approach is both memory-efficient and scalable, making it useful for real-time or large-scale tasks, without needing labeled data of anomalies in the training dataset.Gaussian Mixture Model (GMM)
A Gaussian Mixture Model represents a probability distribution as a mixture of multiple Gaussian (normal) distributions. Each Gaussian component in the mixture represents a cluster of data points with similar characteristics. Thus, GMMs work using the assumption that the samples within a dataset can be modeled using different Gaussian distributions. Anomaly detection using GMM involves identifying data points with low probabilities. If a data point has a significantly lower probability of being generated by the mixture model compared to most other data points, it is considered an anomaly; this will output a high anomaly score. GMM has some overlap with K-means, however, K-means clusters are always circular, spherical or hyperspherical when GMM can model elliptical clusters.Looking for another anomaly detection technique? Or are you using time-based frequency sensor data? See Anomaly detection (GMM) or Anomaly detection (K-Means)
How does GMM work?
- During training,
Xnumber of Gaussian probability distributions are learned from the data whereXis the number of components (or clusters) defined in the learning block page. Samples are assigned to one of the distributions based on the probability that it belongs to each. We use Sklearn under the hood and the anomaly score corresponds to thelog-likelihood. - For the inference, we calculate the probability (which can be interpreted as a distance on a graph) for a new data point belonging to one of the populations in the training data. If the data point belongs to a cluster, the anomaly score will be low.
Setting up the Visual Anomaly Detection learning block
First, select your Scoring function and Backbone of choice under “Neural network architecture”: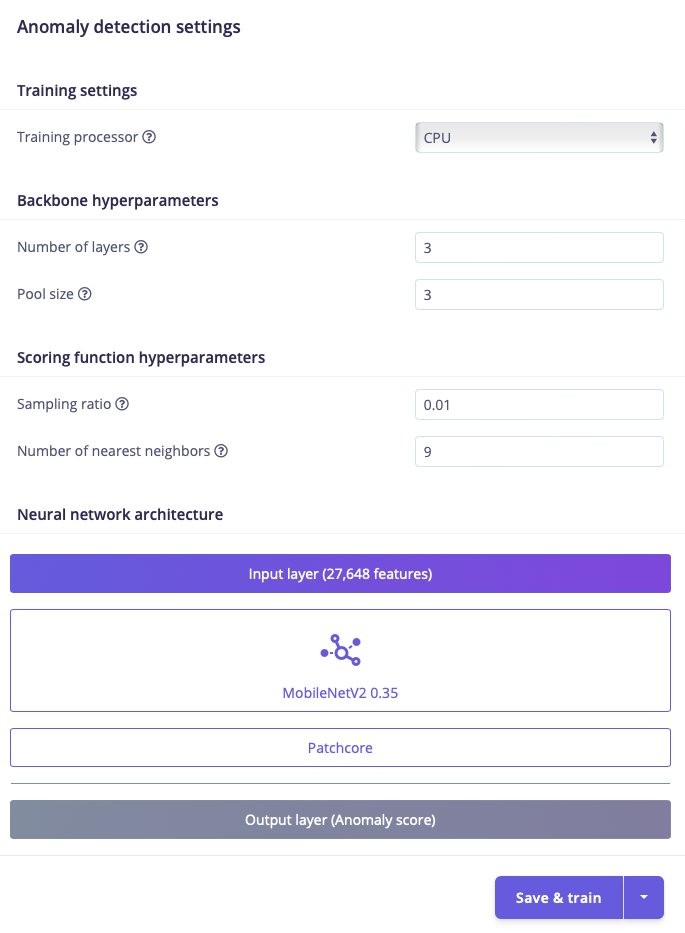
Settings for Visual Anomaly Detection
Based on the deployment target configuration of your project, the Visual Anomaly Detection (FOMO-AD) learning block will default to either GMM for a low-power device or Patchcore for a high-power device.
PatchCore
The PatchCore Visual Anomaly Detection learning block has multiple adjustable parameters. The neural network architecture is also adjustable.- Number of layers: The number of layers in the feature extractor
- Try with a single layer and then increase layers if the anomalies are not being detected.
- Pool size: The pool size for the feature extractor
- The kernel size for average 2D pooling over the extracted features, size 1 = no pooling.
- Sampling ratio: The sampling ratio for the core set, used for anomaly scoring
- This is the ratio of features from the training set patches that are saved to the memory bank to give an anomaly score to each patch at inference time. Larger values increases the size of the model and can lead to overfitting to the training data.
- Number of nearest neighbors: The number of nearest neighbors to consider, used for anomaly scoring
- The number of nearest neighbors controls how many neighbors to compare patches to when calculating the anomaly score for each patch.
GMM
The GMM Visual Anomaly Detection learning block has one adjustable parameter: capacity. The neural network architecture is also adjustable. Regardless of what resolution we intend to use for raw image input, we empirically get the best result for anomaly detection from using96x96 ImageNet weights. We use 96x96 weights since we’ll only being used the start of MobileNet to reduce to 1/8th input.
Capacity
The higher the capacity, the higher the number of (Gaussian) components, and the more adapted the model becomes to the original distribution.Custom architectures
In addition to the built-in PatchCore and GMM scoring functions, you can use a custom learning block for visual anomaly detection. The training page provides two tabs under Neural network architecture to switch between modes:- Backbone + Scoring function — use this tab to configure the built-in GMM or PatchCore models with a selectable backbone.
- Complete architecture / Custom blocks — use this tab to select a custom model from your organization’s custom learning blocks.
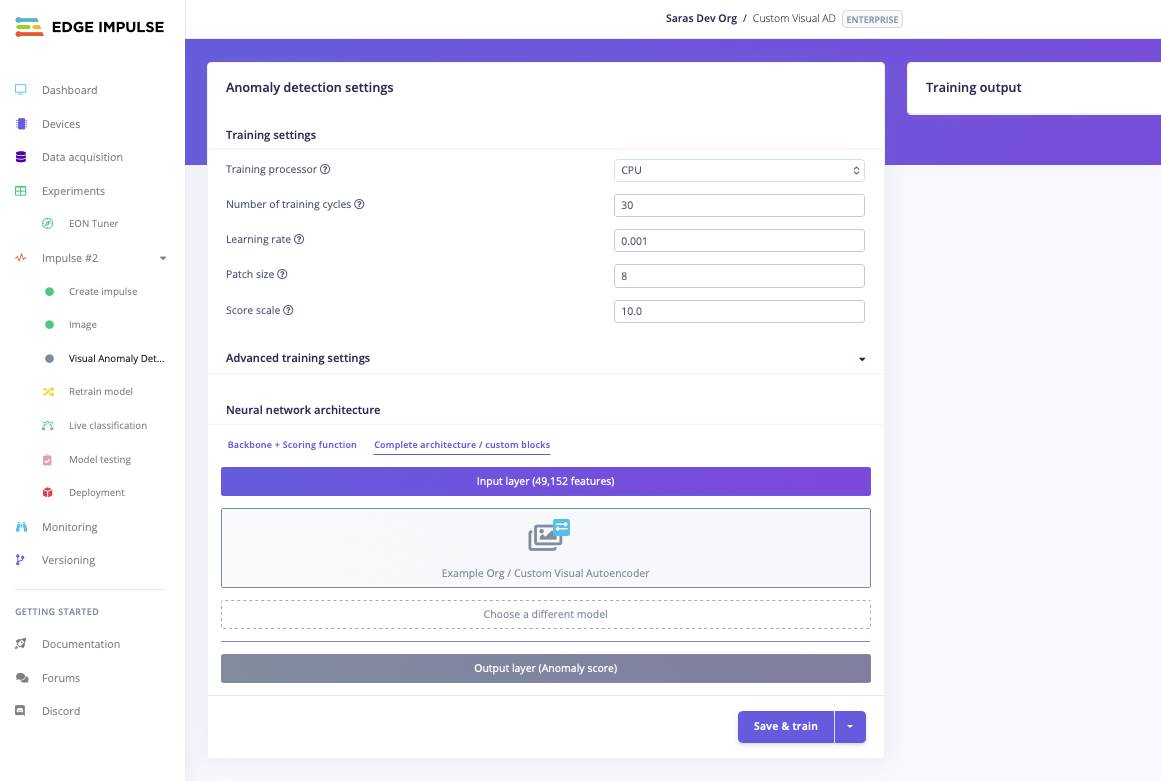
Toggle between built-in and custom model architectures
Train
Click on Start training to trigger the learning process. Once trained you will obtain a trained model view that looks like the following: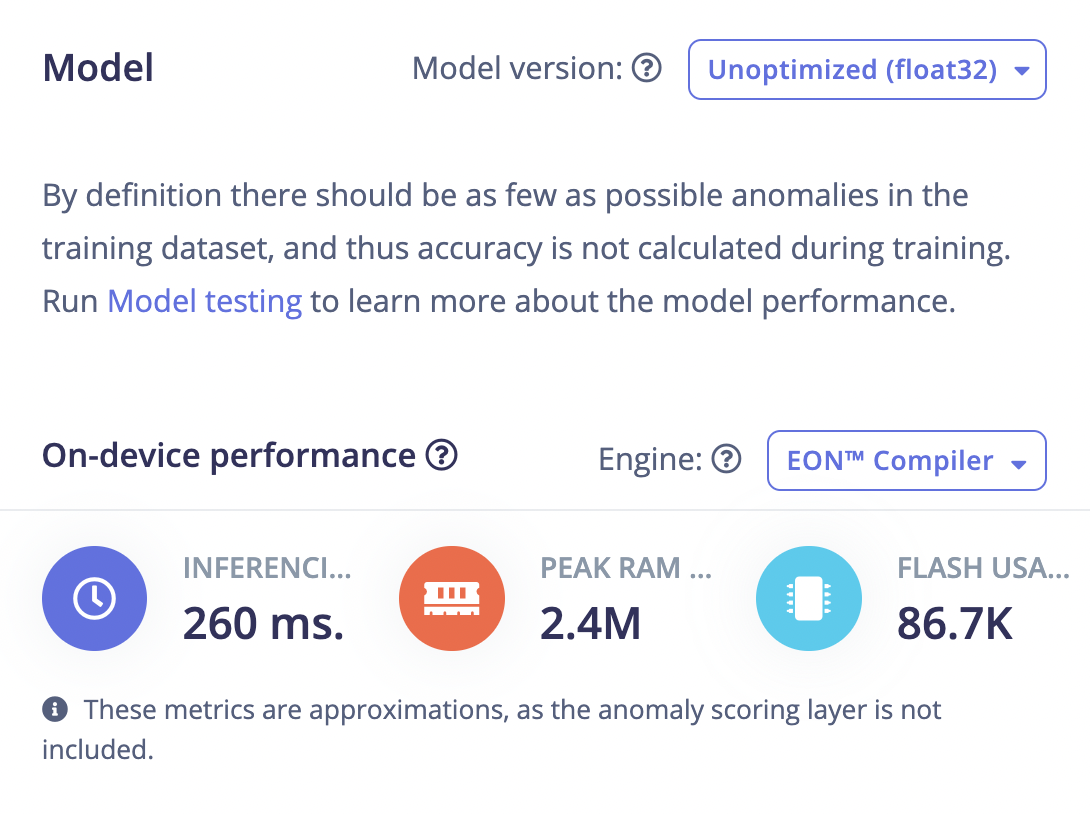
Trained model view for Visual Anomaly Detection.
Testing the Visual Anomaly Detection learning block
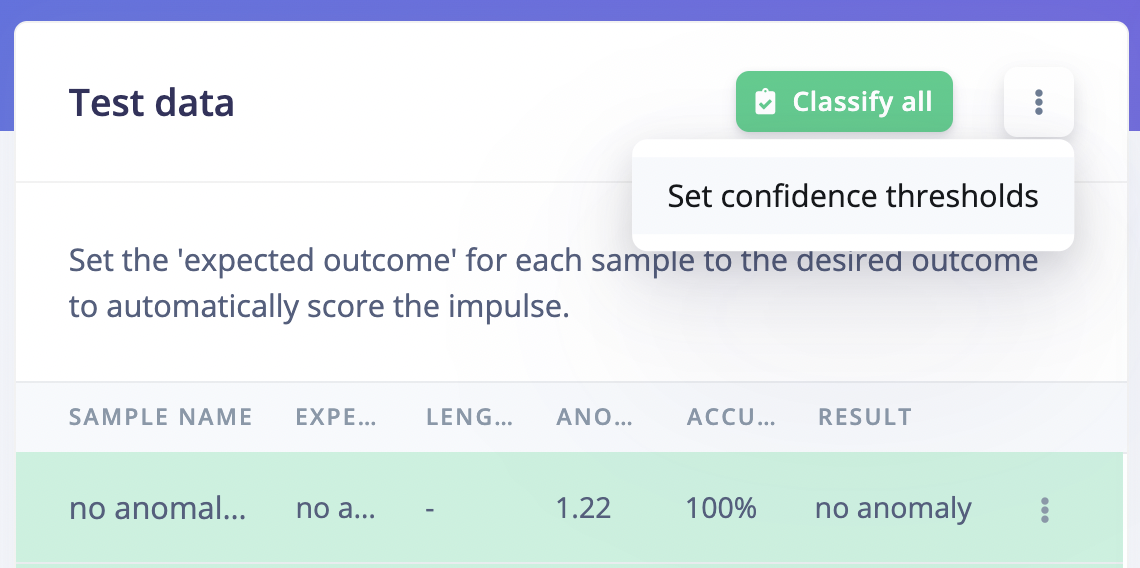
Navigate to the Model testing page and click on Classify all:
Model testing view with sample selected.
Confidence threshold
In the example above, you will see that some samples have regions that are considered asno anomaly while the expected output is an anomaly. To adjust this prediction, you can set the Confidence thresholds, where you can also see the default or suggested value: “Suggested value is 16.6, based on the top anomaly scores in the training dataset.”:
View confidence thresholds.
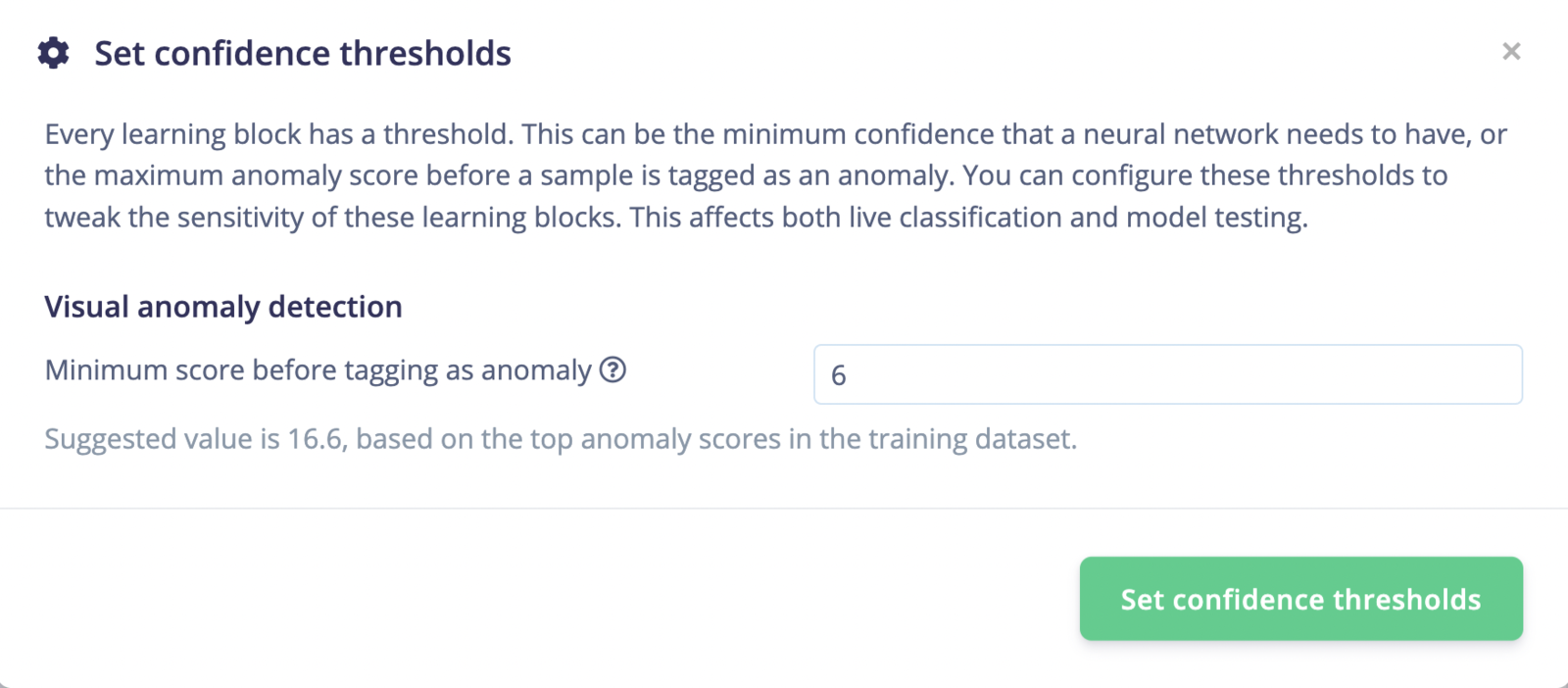
Set confidence thresholds.
6. This gives results closer to our expectations:
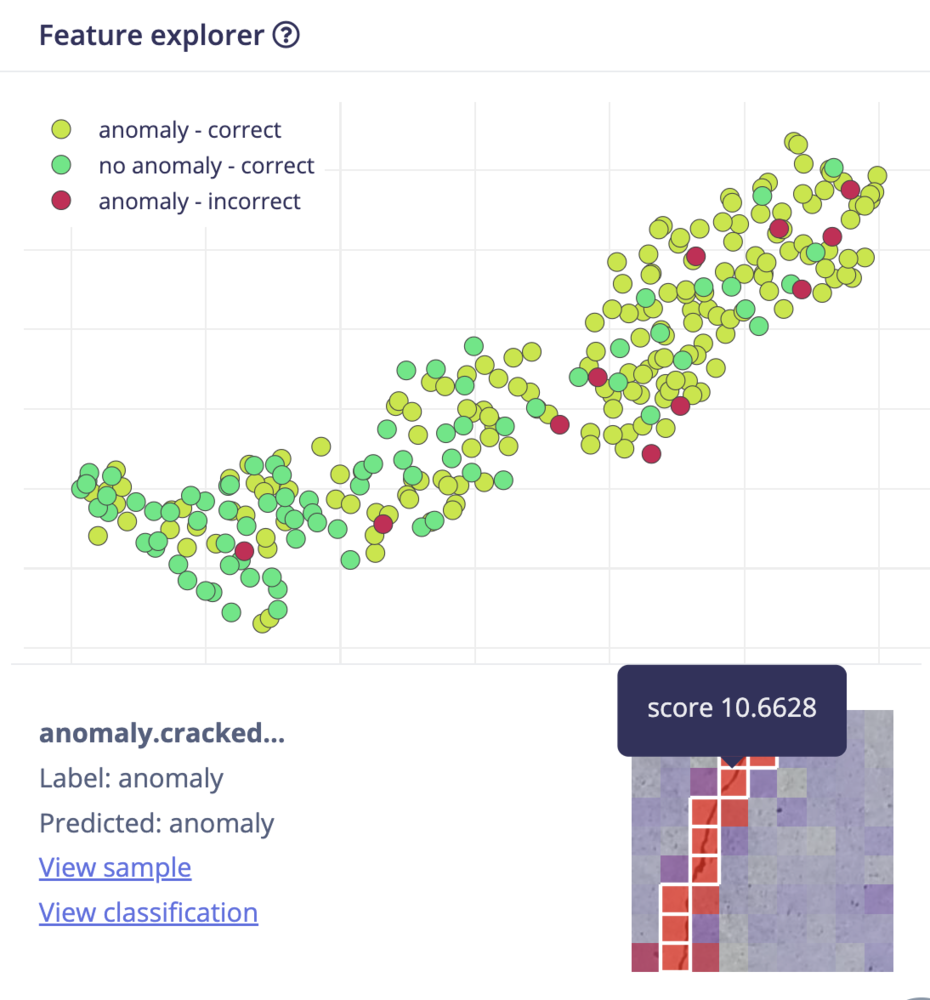
Model testing view and sample selected after confidence thresholds modified.
- Cells with white borders are the ones that passed as anomalous, given the confidence threshold of the learning block.
- All cells are assigned a cell background color based on the anomaly score, going from blue to red, with an increasing opaqueness.
- Hover over the cells to see the scores.
- The grid size is calculated as
(inputWidth / 8) / 2 - 1for GMM and asinputWidth / 8for PatchCore. For custom blocks, the grid size is derived from the output shape of the model.
np.max(scores) where scores are the scores of the training dataset.
Dataset recommendations
Background consistency
FOMO-AD learns what “normal” looks like from your training data — including the background. If the background changes between training and deployment (different lighting, a moved fixture, a different surface), those changes will likely be scored as anomalies, even when the object itself is fine. To avoid false positives caused by the background:- Keep the background as consistent as possible between training images and real-world deployment conditions (same surface, lighting, and camera position).
- If some background variation is unavoidable, include images that capture that variation in your training set so the model learns it as normal. The model can learn to treat a changing background as normal, but only if it has seen that variation during training.
Object orientation
FOMO-AD does not automatically generalize across object orientations it has not seen. If your training data only contains objects in one orientation, the model may flag a differently oriented (but otherwise normal) object as anomalous. To handle orientation variation:- Include images from all orientations that the model will encounter at inference time.
- Where possible, balance the number of images across orientations. A heavily imbalanced dataset (many images of one orientation, few of another) can cause the model to be less reliable for the under-represented orientations.
Additional resources
Interesting readings:- Python Data Science Handbook - Gaussian Mixtures
- scikit-learn.org - Gaussian Mixture models
- PatchCore - Towards Total Recall in Industrial Anomaly Detection