#!/usr/bin/python3
import sys
import signal
import time
import cv2
import numpy as np
import traceback
import threading
import logging
import queue
import collections
import matplotlib.pyplot as plt
from matplotlib import cm
from tflite_runtime.interpreter import Interpreter
def avg_fps_counter(window_size):
window = collections.deque(maxlen=window_size)
prev = time.monotonic()
yield 0.0 # First fps value.
while True:
curr = time.monotonic()
window.append(curr - prev)
prev = curr
yield len(window) / sum(window)
def sigint_handler(sig, frame):
logging.info('Interrupted')
sys.exit(0)
signal.signal(signal.SIGINT, sigint_handler)
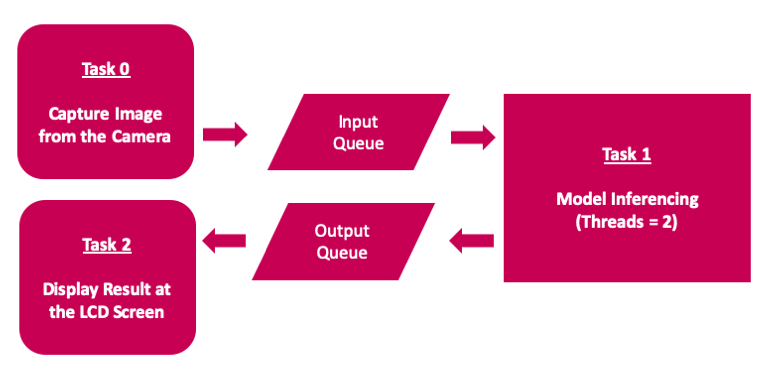
def capture(queueIn):
global terminate
global zoom
videoCapture = cv2.VideoCapture(0)
if not videoCapture.isOpened():
logging.error("Cannot open camera")
sys.exit(-1)
while True:
if terminate:
logging.info("Capture terminate")
break
prev = time.time()
try:
success, frame = videoCapture.read()
if success:
frame = cv2.rotate(frame, cv2.ROTATE_90_CLOCKWISE)
img = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
if zoom:
w, h = 320, 320
x = (img.shape[1] - w) / 2
y = (img.shape[0] - h)/ 2
img = img[int(y):int(y+h), int(x):int(x+w)]
img = cv2.resize(img, (width, height))
img = img / 255.0
img = img.astype(np.float32)
img_scaled = (img / input_scale) + input_zero_point
input_data = np.expand_dims(img_scaled, axis=0).astype(input_details[0]["dtype"])
if not queueIn.full():
queueIn.put((img, input_data))
logging.info('Image Captured')
else:
raise RuntimeError('Failed to get frame!')
except Exception as inst:
logging.error("Exception", inst)
logging.error(traceback.format_exc())
videoCapture.release()
break
def inferencing(interpreter, queueIn, queueOut):
global terminate
global show_heatmap
while True:
if terminate:
logging.info("Inferencing terminate")
break
start_time = time.time()
try:
if queueIn.empty():
time.sleep(0.01)
continue
img, input_data = queueIn.get()
interpreter.set_tensor(input_details[0]['index'], input_data)
interpreter.invoke()
output_0_tensor = interpreter.tensor(output_details[0]['index'])
output_1_tensor = interpreter.tensor(output_details[1]['index'])
output_1 = output_1_scale * ((output_1_tensor()).astype(np.float32) - output_1_zero_point)
pred_class = np.argmax(np.squeeze(output_1))
pred_score = np.squeeze(output_1)[pred_class]
dp_out = None
if pred_class == 1 and show_heatmap is True :
dp_out = output_0_scale * (np.squeeze(output_0_tensor())[pred_class].astype(np.float32) - output_0_zero_point)
if not queueOut.full():
queueOut.put((img, pred_class, pred_score, dp_out))
except Exception as inst:
logging.error("Exception", inst)
logging.error(traceback.format_exc())
break
logging.info('Inferencing time: {:.3f}ms'.format((time.time() - start_time) * 1000))
def display(queueOut):
global show_heatmap
global zoom
global terminate
dimension = (960, 720)
ei_logo = cv2.imread('/home/pi/surface_crack_detection/ei_logo.jpg')
ei_logo = cv2.cvtColor(ei_logo, cv2.COLOR_BGR2RGB)
ei_logo = ei_logo / 255.0
ei_logo = ei_logo.astype(np.float32)
ei_logo = cv2.copyMakeBorder(ei_logo, 0, dimension[1] - ei_logo.shape[0], 70, 70, cv2.BORDER_CONSTANT, None, (255, 255, 255))
ei_logo = cv2.copyMakeBorder(ei_logo, 0, dimension[1] - ei_logo.shape[0], 70, 70, cv2.BORDER_CONSTANT, None, (255, 255, 255))
fps_counter = avg_fps_counter(30)
while True:
if queueOut.empty():
time.sleep(0.2)
continue
start_time = time.time()
img, pred_class, pred_score, dp_out = queueOut.get()
if pred_class == 1:
label = 'Crack'
color = (0, 0, 255)
if show_heatmap and dp_out is not None:
heatmap = None
heatmap = cv2.normalize(dp_out, heatmap, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
colormap = plt.get_cmap('jet')
img = cv2.addWeighted(img, 1.0, colormap(heatmap).astype(np.float32)[:,:,:3], 0.4, 0)
else:
if pred_class == 0:
label = 'No Crack'
color = (0, 0, 0)
else:
label = 'Unknown'
color = (255, 0, 0)
final_img = cv2.resize(img, dimension, interpolation=cv2.INTER_CUBIC)
font = cv2.FONT_HERSHEY_SIMPLEX
final_img = np.hstack((final_img, ei_logo))
final_img = cv2.cvtColor(final_img, cv2.COLOR_RGB2BGR)
final_img = cv2.putText(final_img, label, (980, 200), font, 2, color, 3, cv2.LINE_AA)
final_img = cv2.putText(final_img, f'({pred_score*100:0.1f}%)', (980, 280), font, 2, (0, 0, 0), 3, cv2.LINE_AA)
fps = round(next(fps_counter))
final_img = cv2.putText(final_img, f'Fps:{fps}', (980, 360), font, 2, (0, 0, 0), 3, cv2.LINE_AA)
final_img = cv2.putText(final_img, f'Heat:{"On" if show_heatmap else "Off"}', (980, 440), font, 2, (0, 0, 0), 3, cv2.LINE_AA)
final_img = cv2.putText(final_img, f'Crop:{"On" if zoom else "Off"}', (980, 520), font, 2, (0, 0, 0), 3, cv2.LINE_AA)
window_name = "Edge Impulse Inferencing"
cv2.imshow(window_name, final_img)
key = cv2.waitKey(1)
if key == ord('a'):
show_heatmap = not show_heatmap
logging.info(f"Heatmap: {show_heatmap}")
if key == ord('s'):
zoom = not zoom
logging.info(f"Zoom: {zoom}")
if key == ord('f'):
terminate = True
logging.info("Display Terminate")
break
logging.info('Display time: {:.3f}ms'.format((time.time() - start_time) * 1000))
if __name__ == '__main__':
log_fmt = "%(asctime)s: %(message)s"
logging.basicConfig(format=log_fmt, level=logging.ERROR, datefmt="%H:%M:%S")
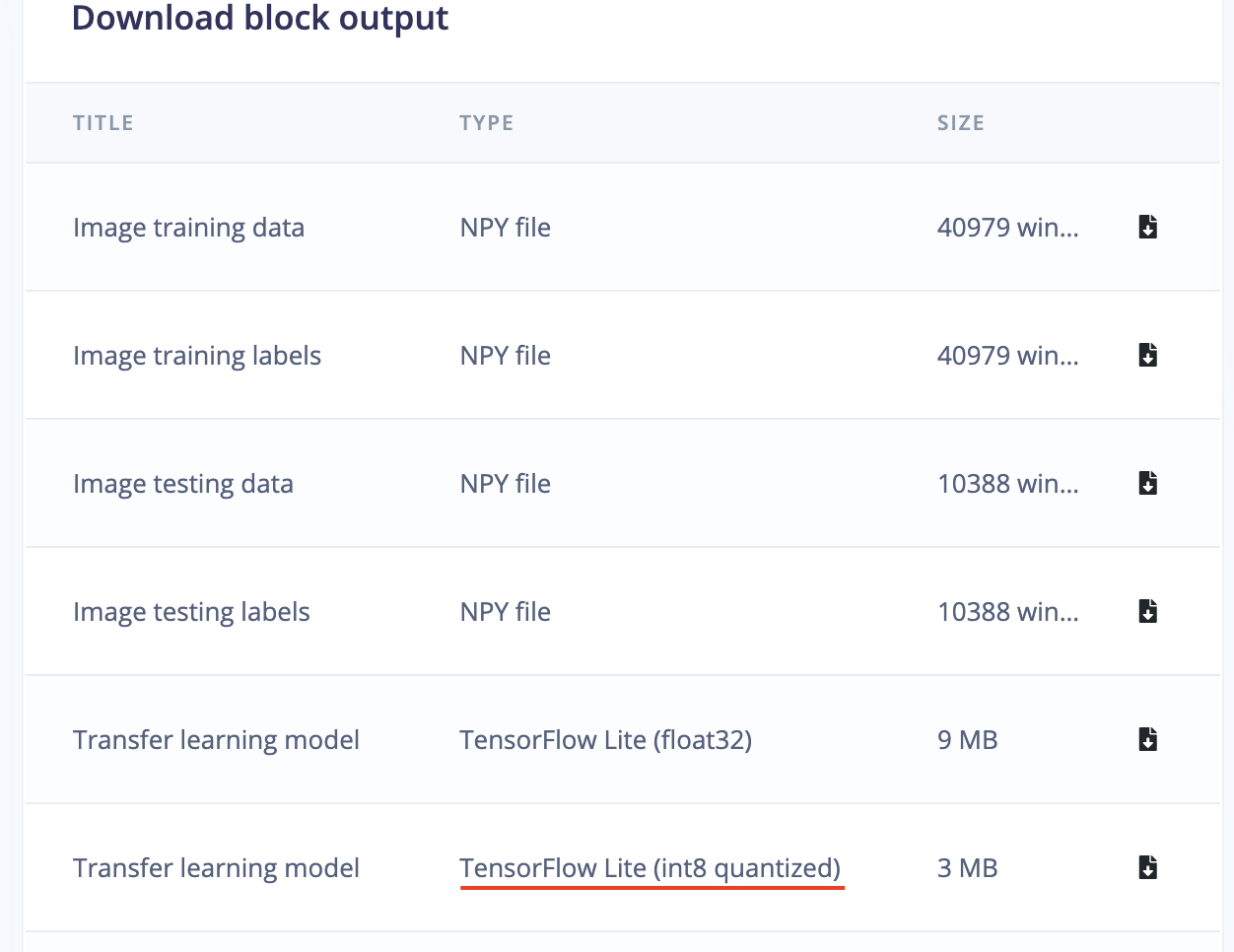
model_file = '/home/pi/surface_crack_detection/model/quantized-model.lite'
interpreter = Interpreter(model_path=model_file, num_threads=2)
interpreter.allocate_tensors()
input_details = interpreter.get_input_details()
#logging.debug(input_details)
output_details = interpreter.get_output_details()
height = input_details[0]['shape'][1]
width = input_details[0]['shape'][2]
input_scale, input_zero_point = input_details[0]['quantization']
output_0_scale, output_0_zero_point = output_details[0]['quantization']
output_1_scale, output_1_zero_point = output_details[1]['quantization']
queueIn = queue.Queue(maxsize=1)
queueOut = queue.Queue(maxsize=1)
show_heatmap = False
zoom = False
terminate = False
t1 = threading.Thread(target=capture, args=(queueIn,), daemon=True)
t2 = threading.Thread(target=inferencing, args=(interpreter, queueIn, queueOut), daemon=True)
t3 = threading.Thread(target=display, args=(queueOut,), daemon=True)
t1.start()
logging.info("Thread start: 1")
t2.start()
logging.info("Thread start: 2")
t3.start()
logging.info("Thread start: 3")
t1.join()
t2.join()
t3.join()