
Introduction
In the 1970s, a Russian engineer named Bikov trained pigeons for visual anomaly detection. According to Bikov, pigeons have better sight and concentration than humans (Máquinas del siglo XX, Muslin, E., 1974). Fortunately, today we have better options than becoming bird experts or paying people not to blink in front of an inspection line. With the right tools, we can easily train a Machine Learning model and set up a system to spot visual anomalies, to automatically remove faulty pieces from the manufacturing production line.Parts Required
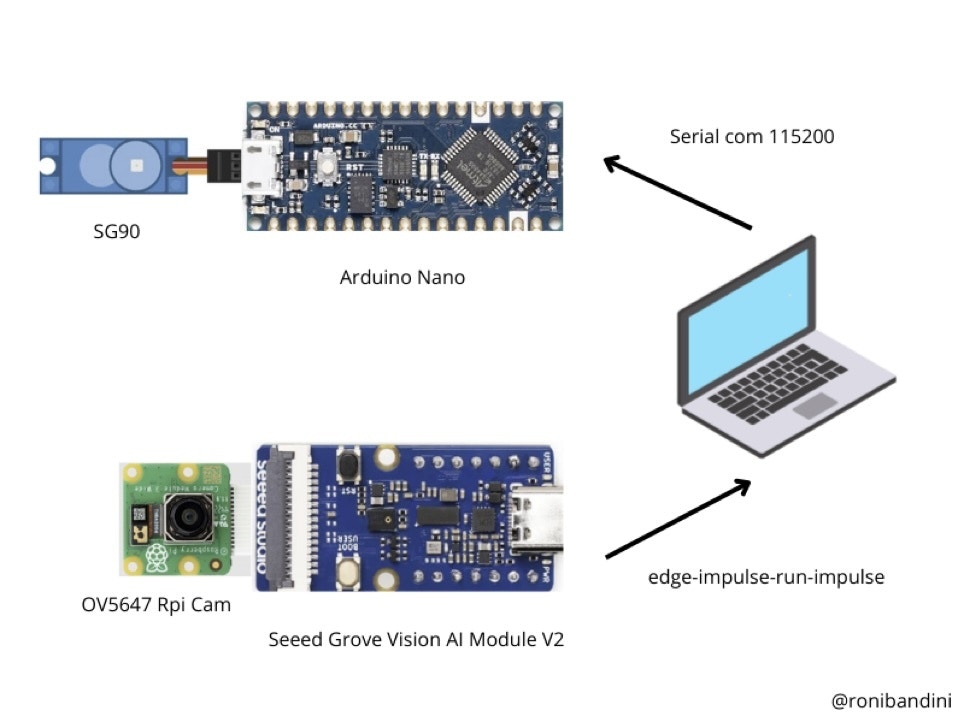
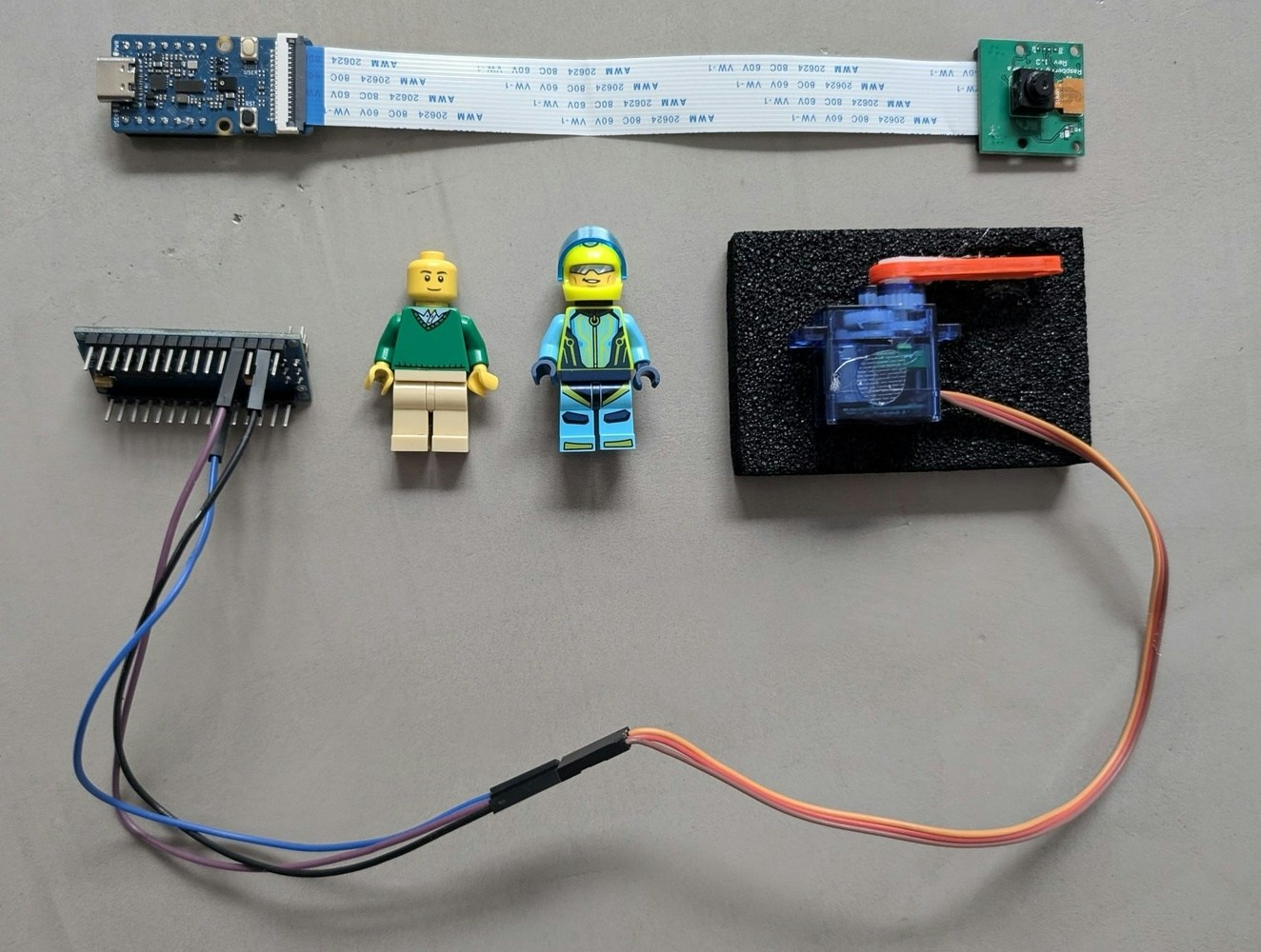
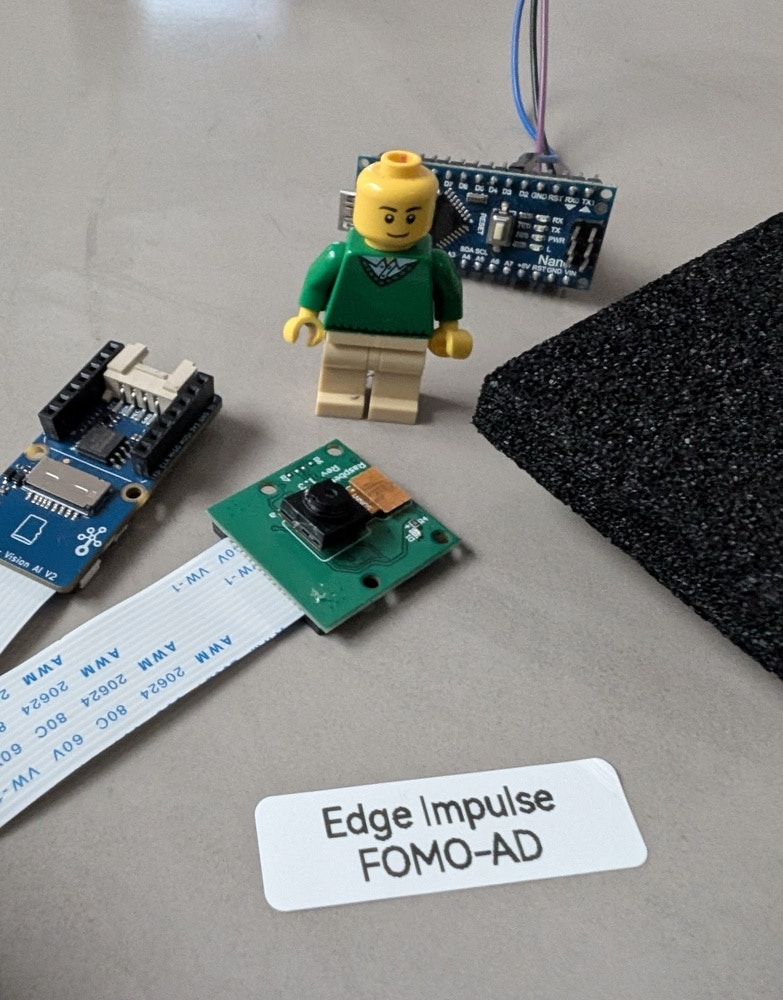
For this project I will use the Seeed Grove Vision AI Module V2. This module has a WiseEye2 HX6538 processor with a dual-core Arm Cortex-M55 and integrated Arm Ethos-U55 neural processing unit (NPU). It also has 16mb flash memory, a PDM microphone, SD card slot, USB Type-C, and Grove interface. For the inspection servo arm, I will use a separate module made with an Arduino Nano and an SG90 servo motor.- Seeed Grove Vision AI Module V2
- OV5647-62 Raspberry Pi Cam
- CSI Cable
- Arduino Nano
- Servo motor SG90
Model Training
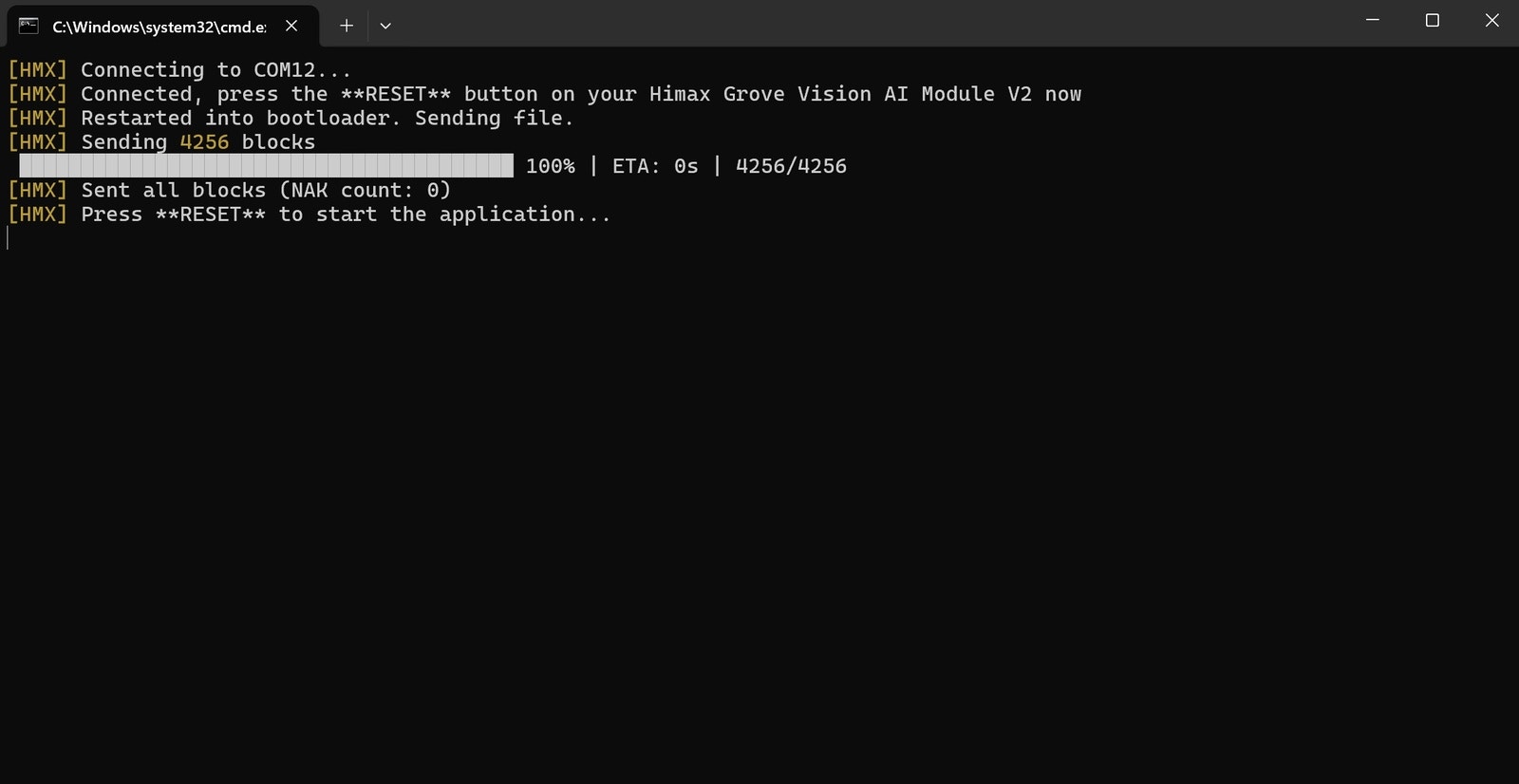
FOMO-AD requires an Enterprise version of Edge Impulse. To explore the capability, you can request an expert-led trial. The Seeed Grove Vision AI V2 board does not come with Edge Impulse firmware out-of-the-box, so it will need to be flashed. To update the firmware, download this file and extract it. Connect the Grove Vision AI V2 to a PC/Mac/Linux via a USB Type-C cable. Within the contents of the extracted firmware.zip file, there are install scripts that will flash your device:
- For MacOS run
flash_mac.command - For Windows run
flash_windows.bat - For Linux run
flash_linux.sh
- For Windows, install Python 3 (it is required later for the parsing script)
- Install Node.js
- Open a terminal and execute
npm install -g edge-impulse-cli --force
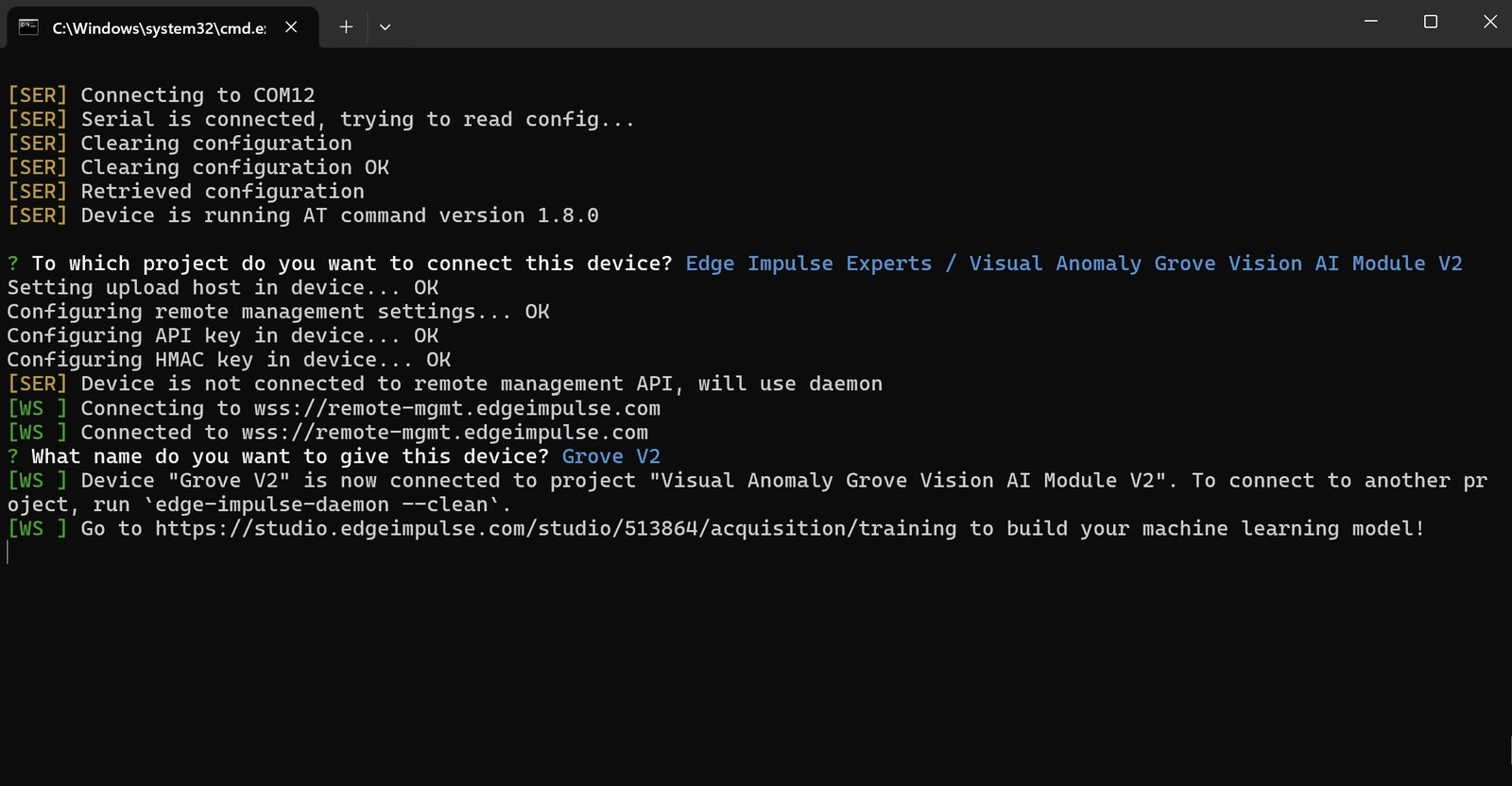
- Run
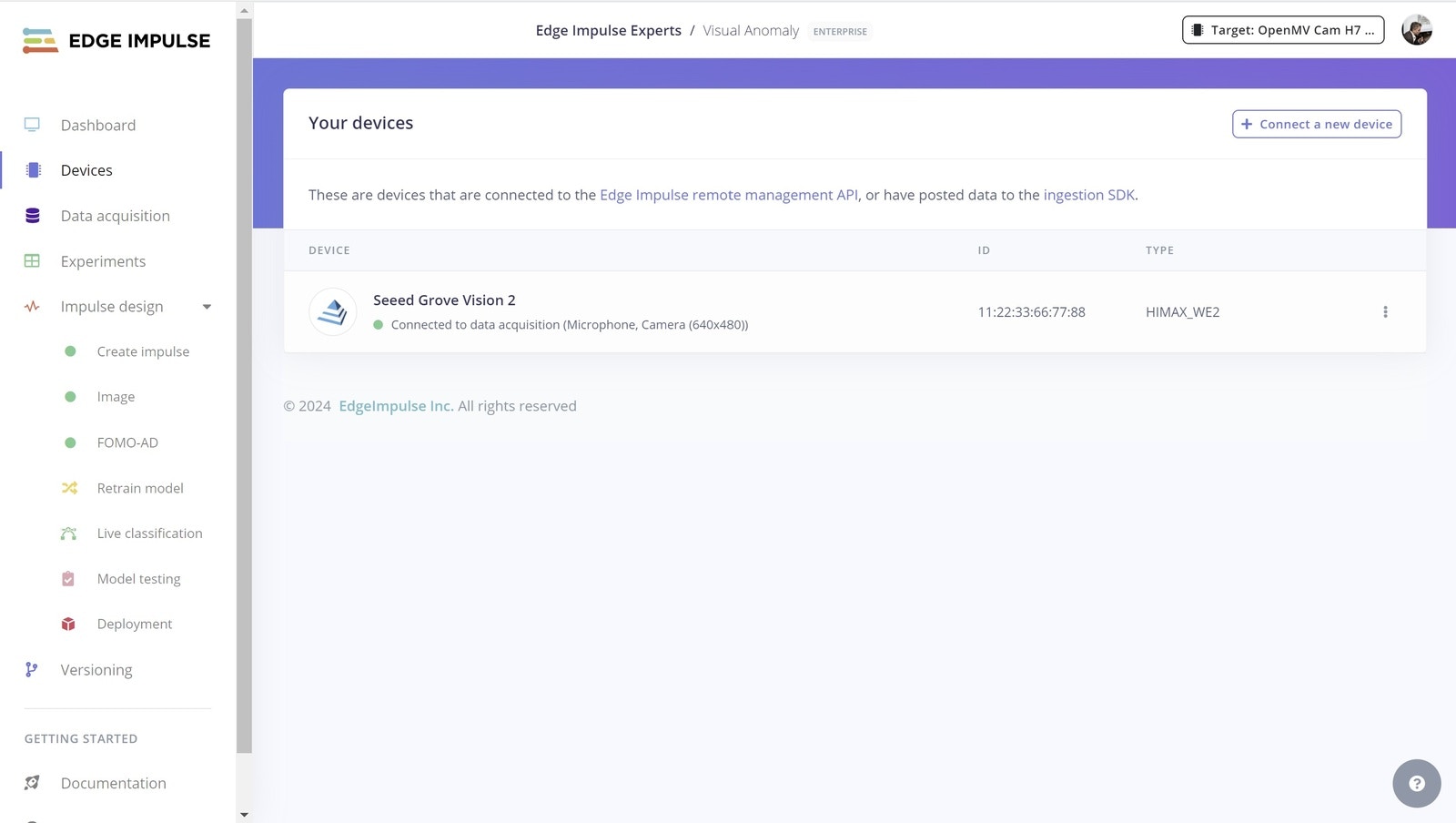
edge-impulse-daemon, login to Edge Impulse, and select your project to start collecting data.
- Sample around 100 pictures using
no anomalyas the label. - Select Image Data, 96x96 pixels, “Squash” as the resize mode, and Visual Anomaly Detection as the Learn block.
- Select Image, RGB Image, Generate Features.
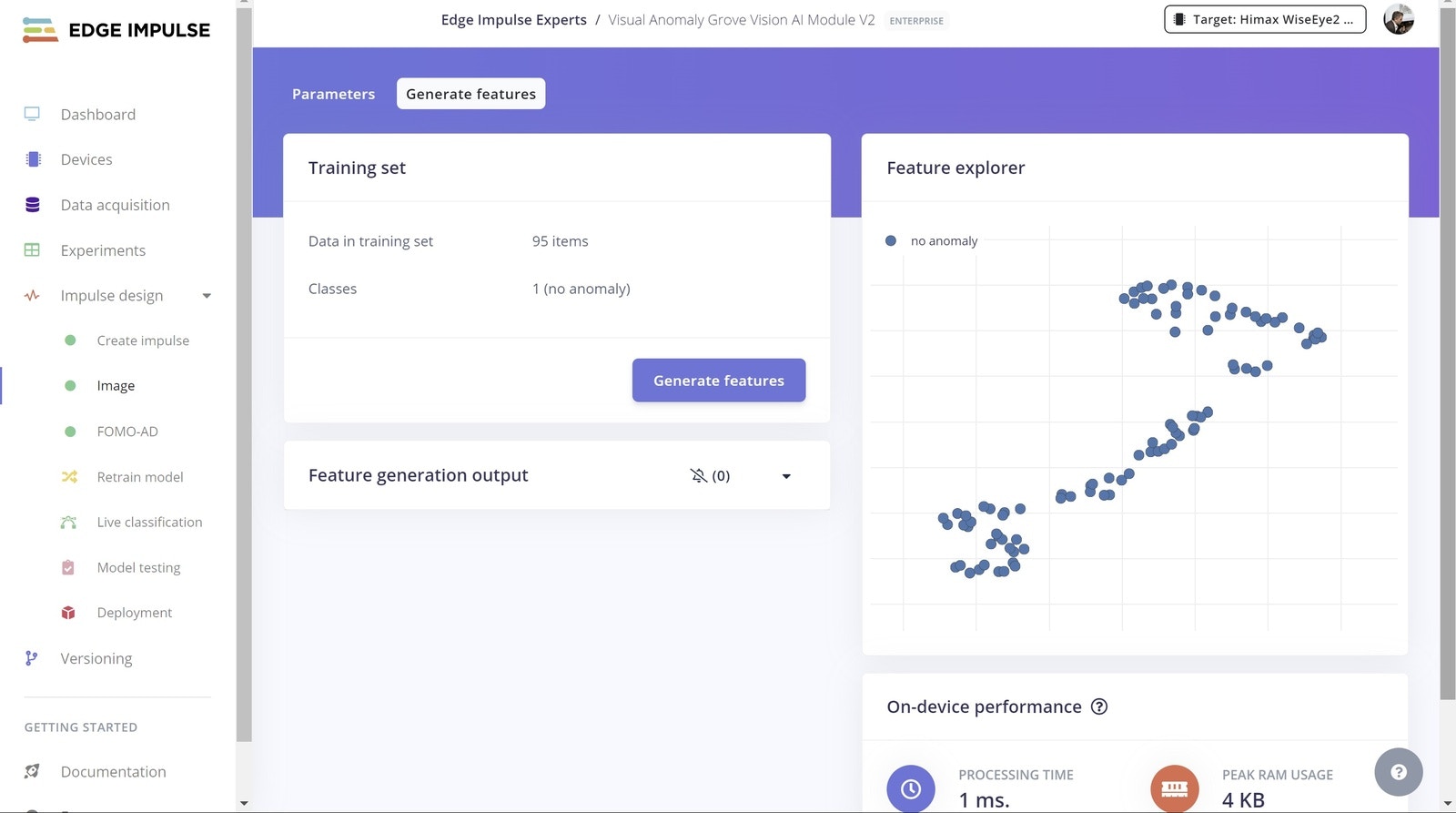
- On the Neural Network settings page, choose FOMO-AD as the architecture, and then select Medium capacity.
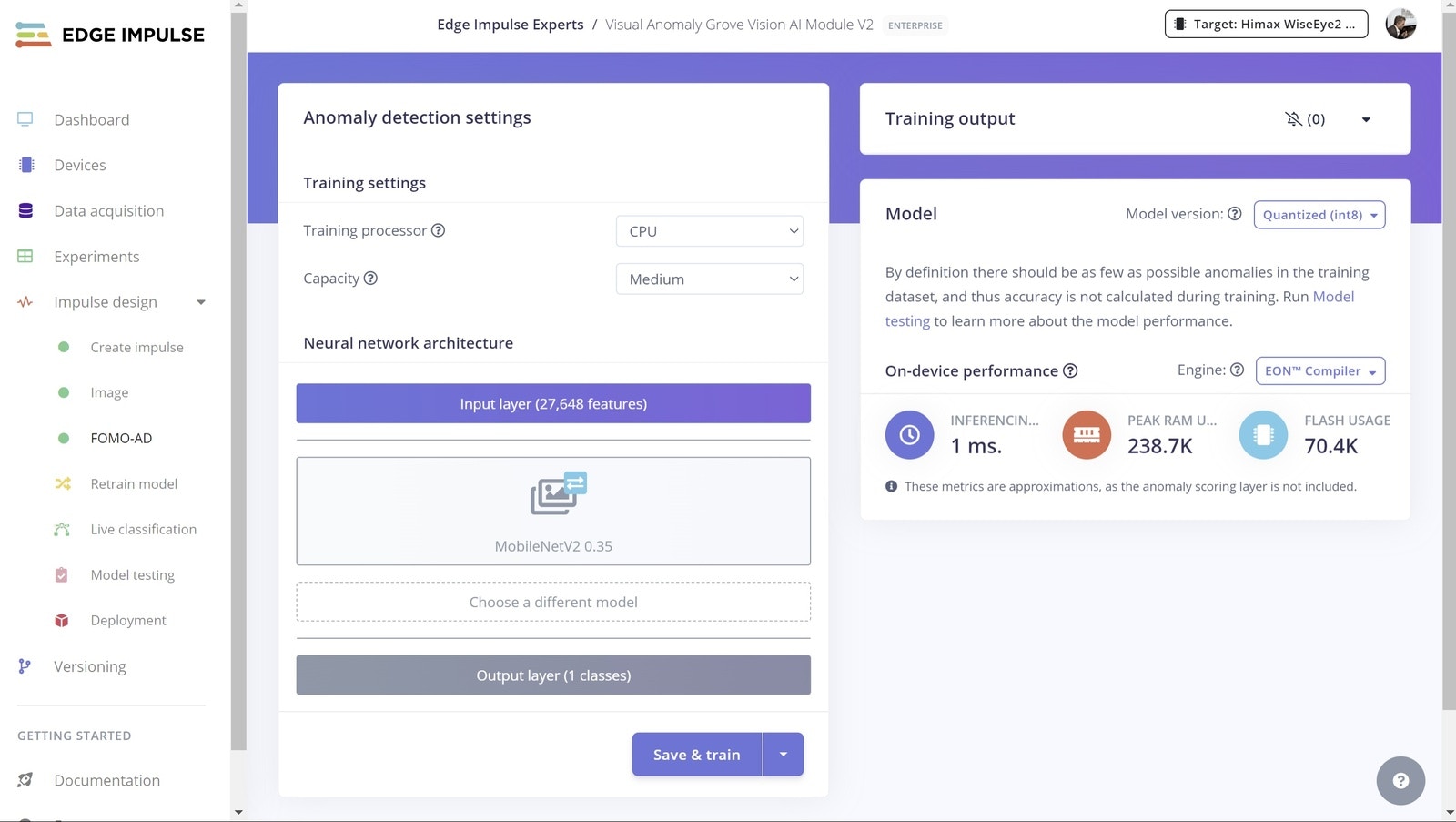
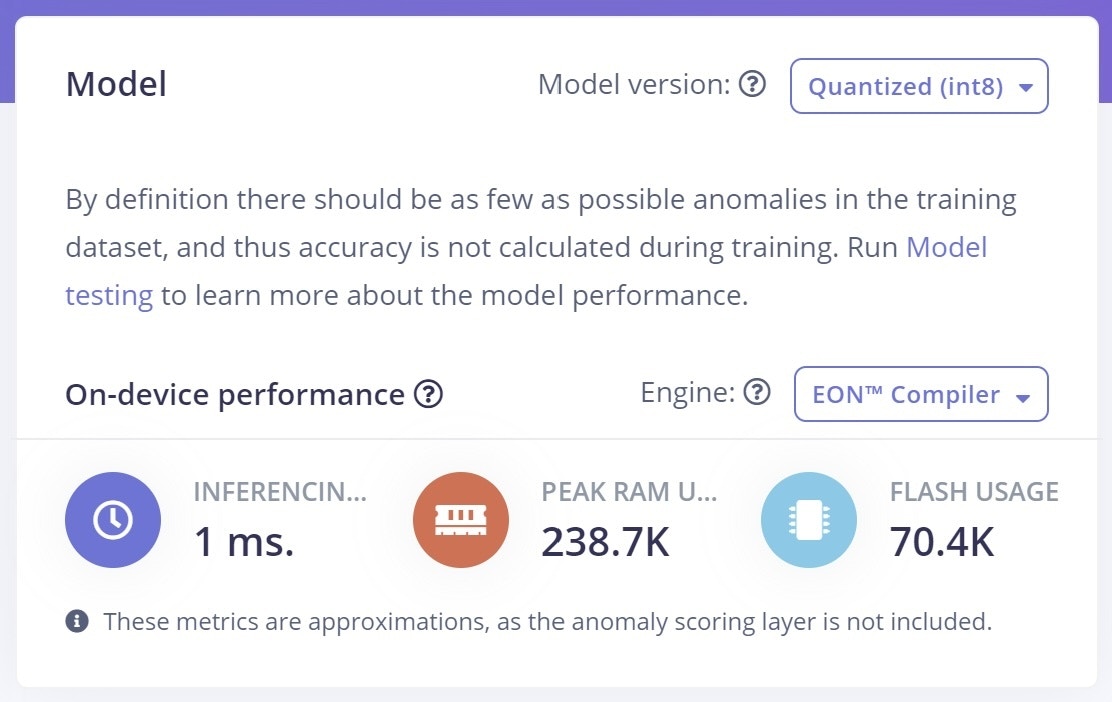
Capacity setting: the higher the capacity, the higher the number of Gaussian components, and the more adapted the model becomes to the original distribution.There should not be any anomalies in the training dataset, as we are only interested in “good” examples, thus accuracy is not calculated here. To calculate an F1 score, after the training has completed, you can upload a set of anomaly pictures and label them as
anomaly.
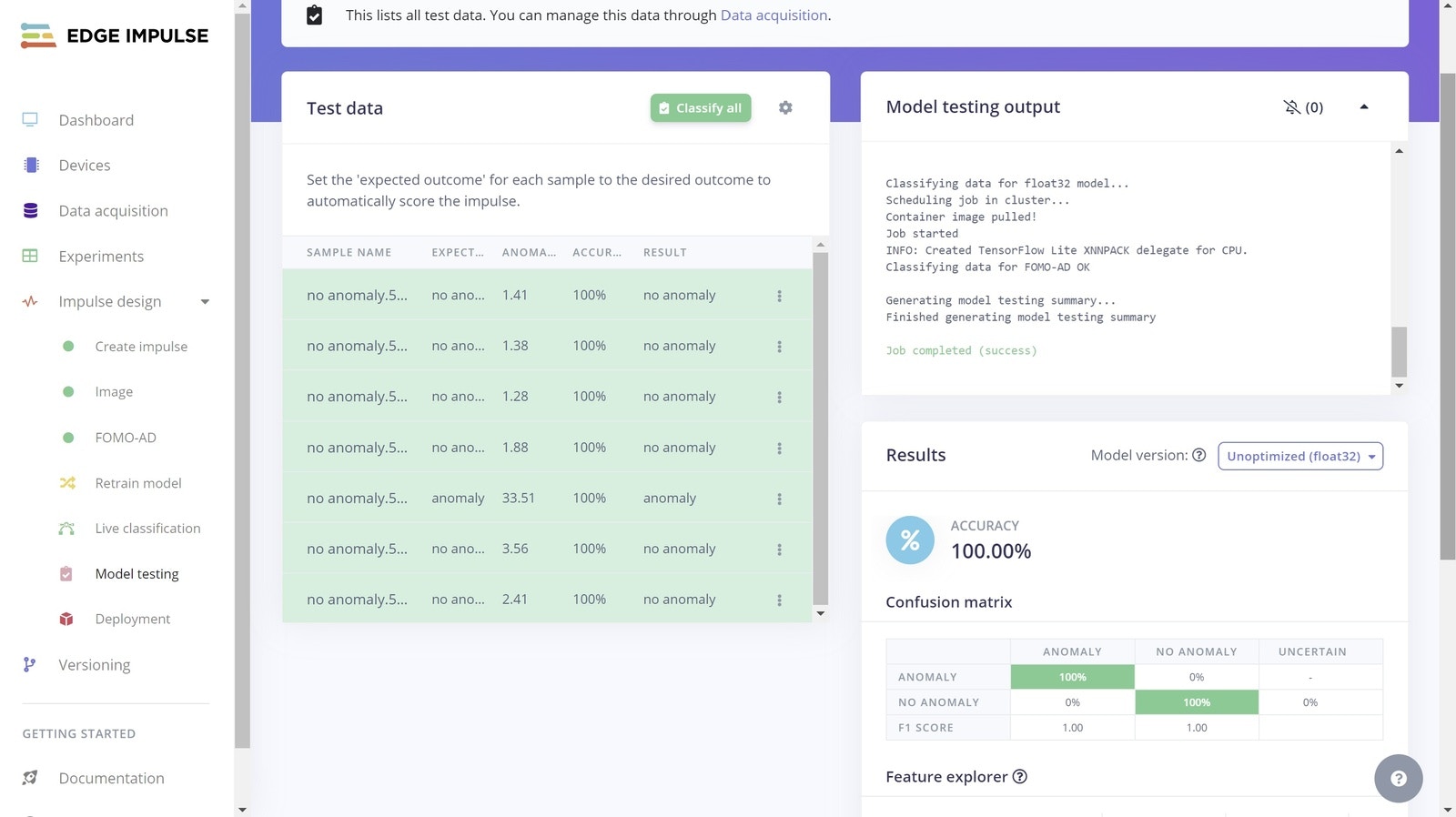
Every learning block has a threshold. This can be the minimum confidence that a neural network needs to have, or the maximum anomaly score before a sample is tagged as an anomaly. You can configure these thresholds to tweak the sensitivity of these learning blocks. This affects both live classification as well as model testing.
Then you can click Classify All and analyze both the global results and specific classifications.
Deployment
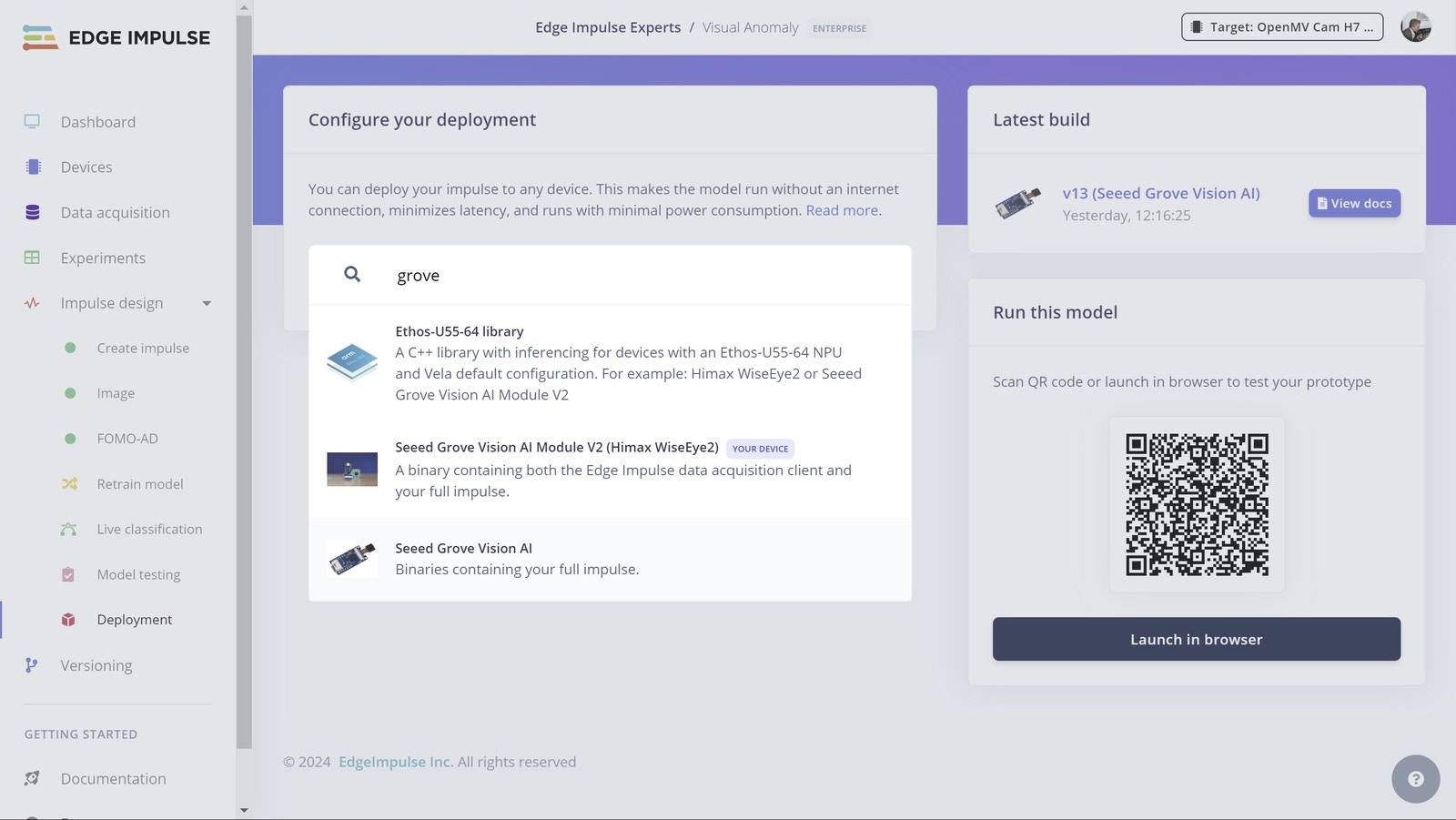
On the Deployment page, select Seeed Grove Vision AI Module V2.
Note: that there is also a Seeed Grove Vision AI for the previous version of the hardware. That should not be selected.
.zip file by clicking Build, and then extract the contents. Connect the Grove Vision AI Module V2 to your computer using a USB-C cable.
Like before, run the flashing script inside of the extracted .zip file that corresponds to your OS. If you get a security warning, you will need to Allow or Accept in order to continue with the flashing of the device.
Results
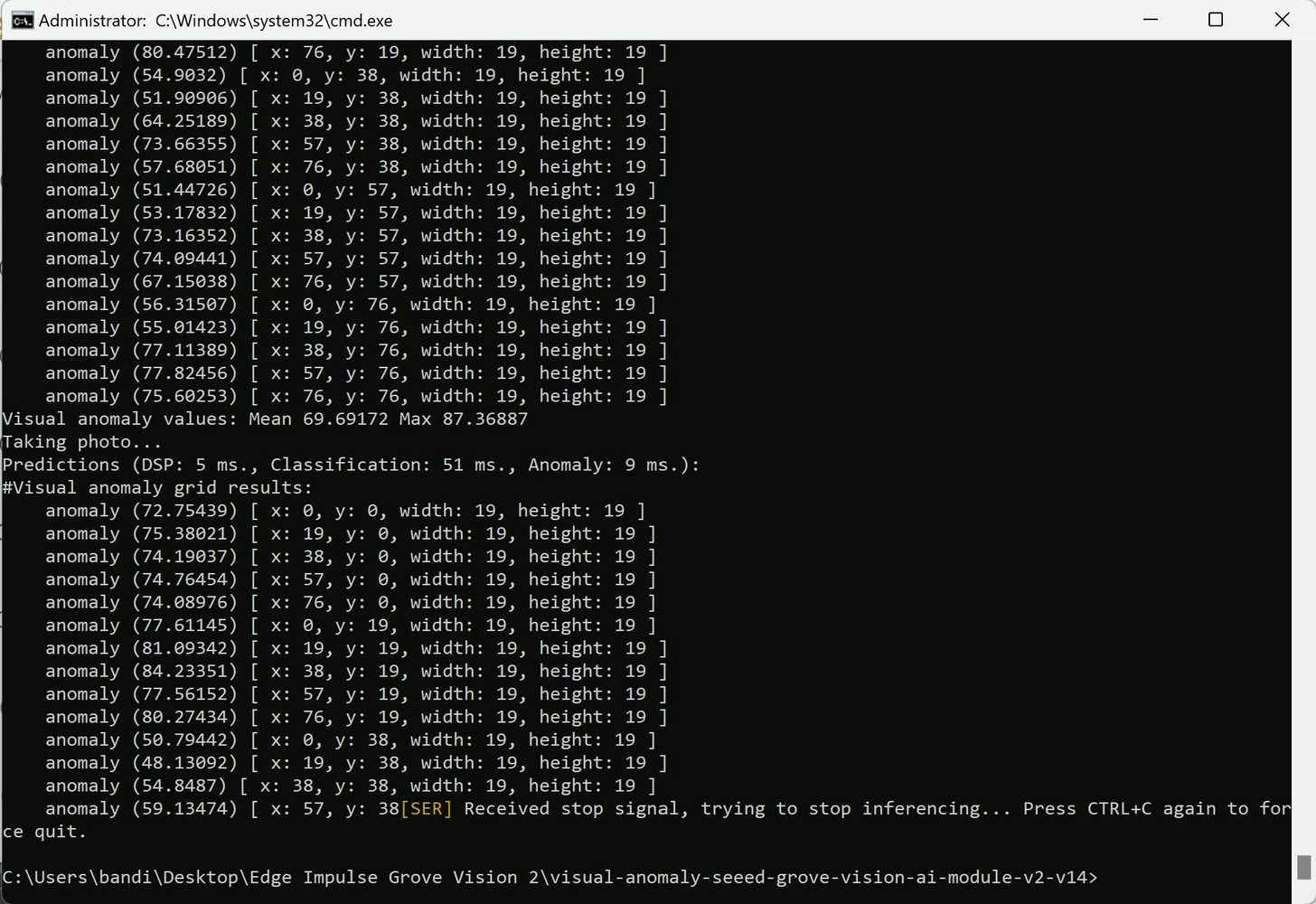
In a terminal, runedge-impulse-run-impulse, login to your Edge Impulse account, and you will notice the inferences begin in the terminal.
anomalyParser.py from https://github.com/ronibandini/visualAnomalyGroveV2.
Next, install these dependencies in your development environment:
Note: If you are going to use Linux, please removeRun the script using:shell=Trueandbufsizefrom the procedure call on line 35.
python anomalyParser.py
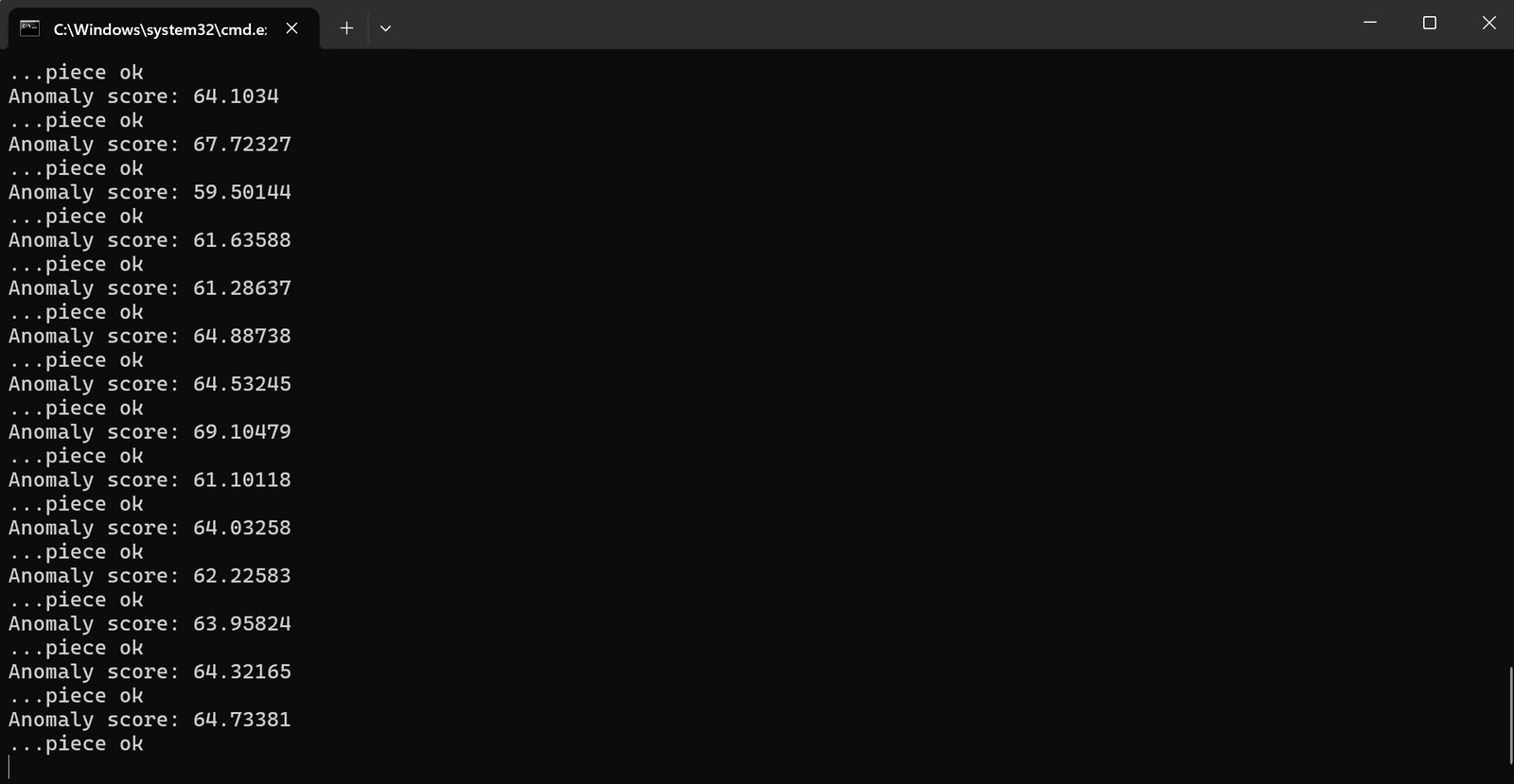
edge-impulse-run-impulse as a subprocess, parse the inference values being output, and send a serial signal to the arm unit made with an Arduino Nano and servo motor.
On the Arduino Nano, we will monitor the serial communication and if there is a 1 we will move the servo.
One issue I found is that having 2 USB devices connected will require a port selection to be made with edge-impulse-run-impulse. With the keyboard Python library, I’m just forcing an Enter for the first option - COM12 in my case - which is my Grove Module port. If you have a COM number higher than the COM assigned to the Arduino servo arm, just insert a down arrow before the “Enter”.
Final Notes
Links
- Project: https://studio.edgeimpulse.com/public/513864/live
- Source Code: https://github.com/ronibandini/visualAnomalyGroveV2