Hardware
The base of the robot is an iRobot Create 3, which is basically a Roomba robot vacuum without the cleaning components. It provides a pair of motorized wheels with encoders, several infrared and bump sensors, an accelerometer, a gyroscope, and more to act as the base for any number of robotics projects. These sensors and actuators are accessible via Robot Operating System 2. Raspberry Pi 4s and NVIDIA Jetsons are officially supported platforms to control the iRobot, and Shield Bot is controlled with a Raspberry Pi 4. This computer provides the processing power to run the machine learning algorithms, run the application logic, and handle interactions with the iRobot. A USB webcam was chosen for capturing images, and it also contains a microphone to sample environmental sounds. A speaker was connected to the Raspberry Pi to play the alarm sound. The LED ring built into the iRobot was used for the flashing lights of the alarm.
Data Collection
The base of the robot is an iRobot Create 3, which is basically a Roomba robot vacuum without the cleaning components. It provides a pair of motorized wheels with encoders, several infrared and bump sensors, an accelerometer, a gyroscope, and more to act as the base for any number of robotics projects. These sensors and actuators are accessible via Robot Operating System 2. Raspberry Pi 4s and NVIDIA Jetsons are officially supported platforms to control the iRobot, and Shield Bot is controlled with a Raspberry Pi 4. This computer provides the processing power to run the machine learning algorithms, run the application logic, and handle interactions with the iRobot. A USB webcam was chosen for capturing images, and it also contains a microphone to sample environmental sounds. A speaker was connected to the Raspberry Pi to play the alarm sound. The LED ring built into the iRobot was used for the flashing lights of the alarm.
Audio Anomaly Detection
I built an impulse that consumes the CSVs of audio data that I previously created and feeds them into a K-means clustering algorithm. After training this model to recognize normal sounds around my house, it was then capable of detecting anything that is out of the ordinary. There was no need to give it examples of abnormal sounds, or to be restricted in the types of anomalous sounds it can detect. It will recognize anything unusual.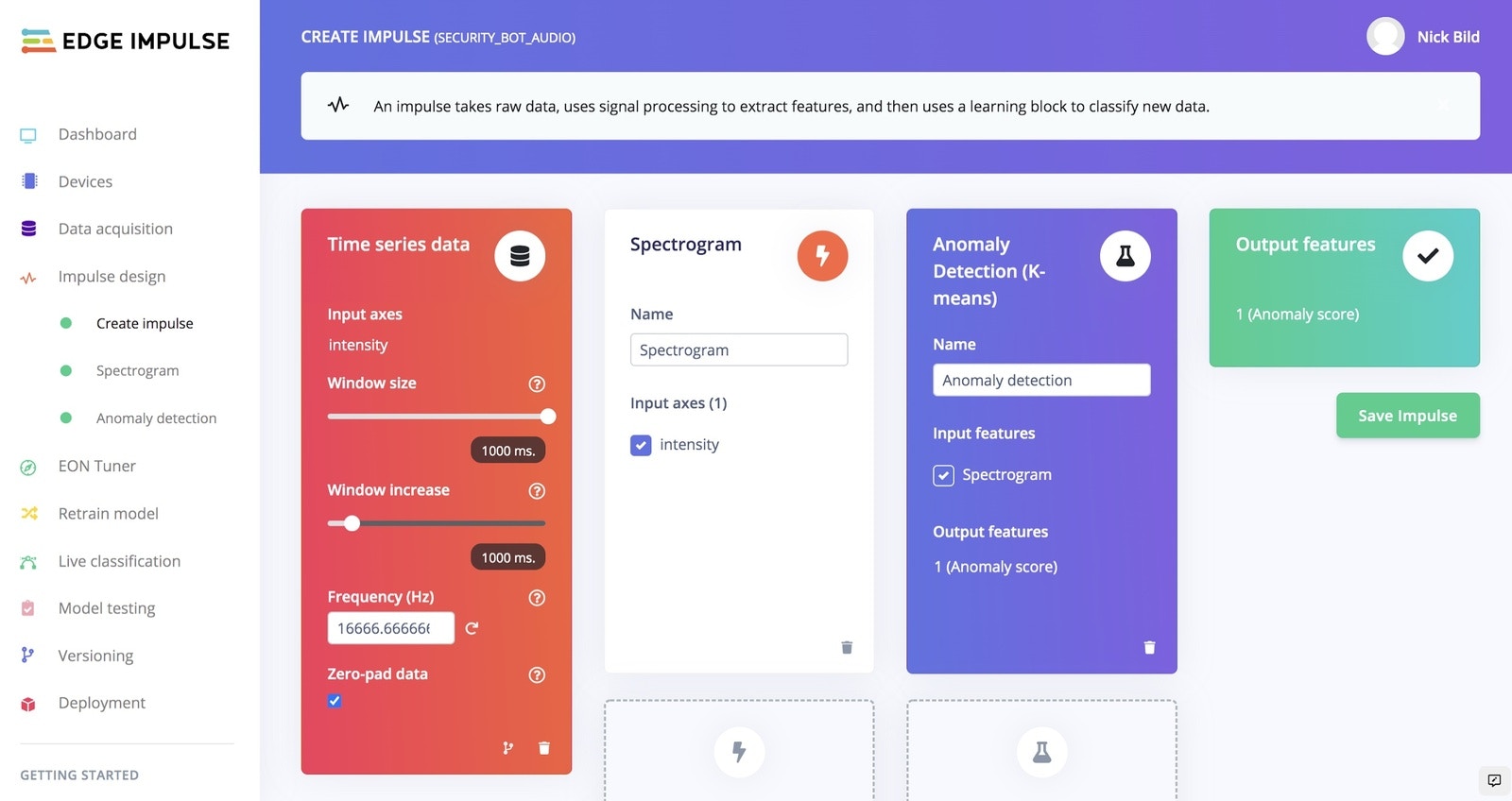
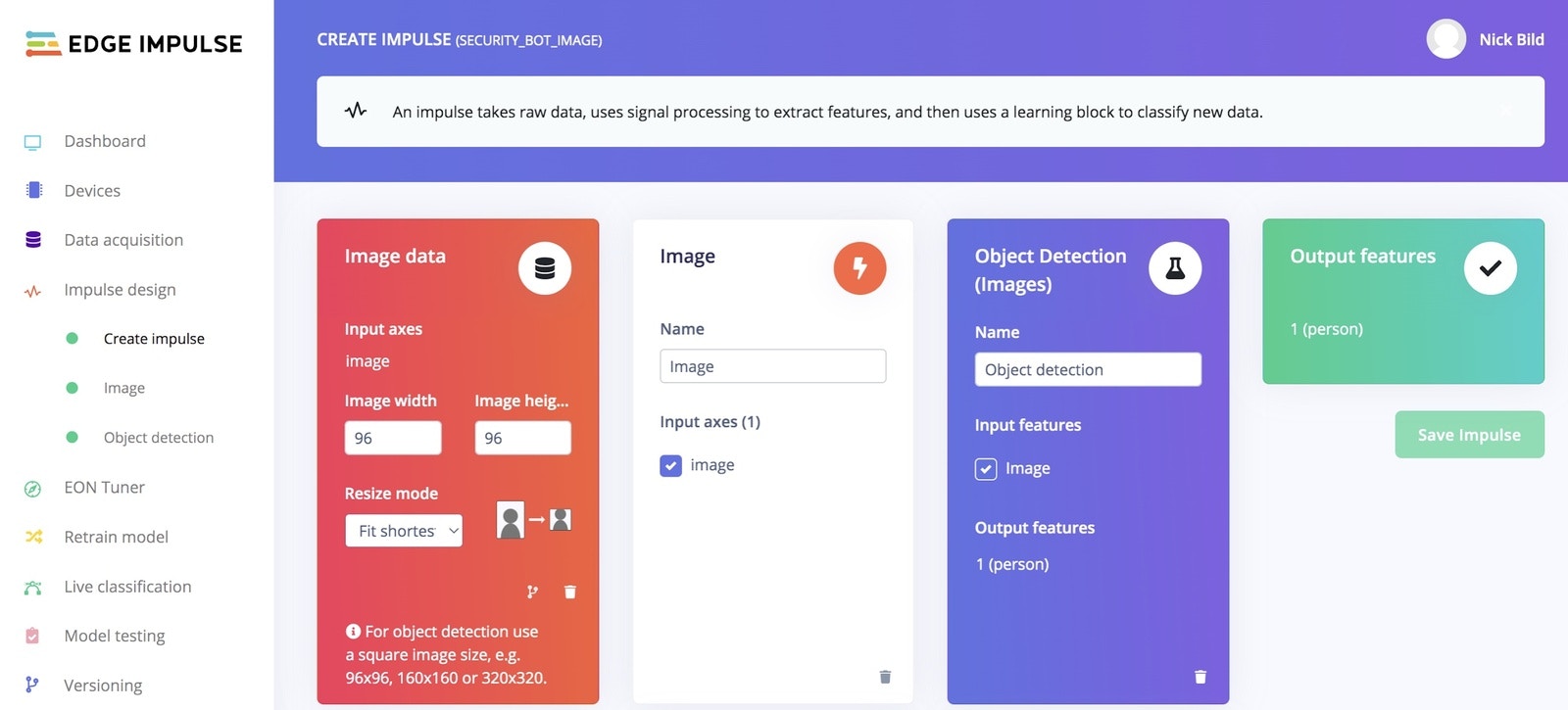
Object Detection
I created a second impulse to analyze the images captured by the webcam and determine if a person is present in each image. This pipeline preprocesses the images and extracts the most important features before feeding them into a FOMO object detection model. FOMO is optimized for great performance on resource-constrained platforms, so it performs exceptionally well on a Raspberry Pi 4.