for res, img in runner.classifier(videoCaptureDeviceId):
if (next_frame > now()):
time.sleep((next_frame - now()) / 1000)
# print('classification runner response', res)
if "classification" in res["result"].keys():
print('Result (%d ms.) ' % (res['timing']['dsp'] + res['timing']['classification']), end='')
for label in labels:
score = res['result']['classification'][label]
print('%s: %.2f\t' % (label, score), end='')
print('', flush=True)
elif "bounding_boxes" in res["result"].keys():
print('Found %d bounding boxes (%d ms.)' % (len(res["result"]["bounding_boxes"]), res['timing']['dsp'] + res['timing']['classification']))
sense.clear()
for bb in res["result"]["bounding_boxes"]:
print('\t%s (%.2f): x=%d y=%d w=%d h=%d' % (bb['label'], bb['value'], bb['x'], bb['y'], bb['width'], bb['height']))
img = cv2.rectangle(img, (bb['x'], bb['y']), (bb['x'] + bb['width'], bb['y'] + bb['height']), (255, 0, 0), 1)
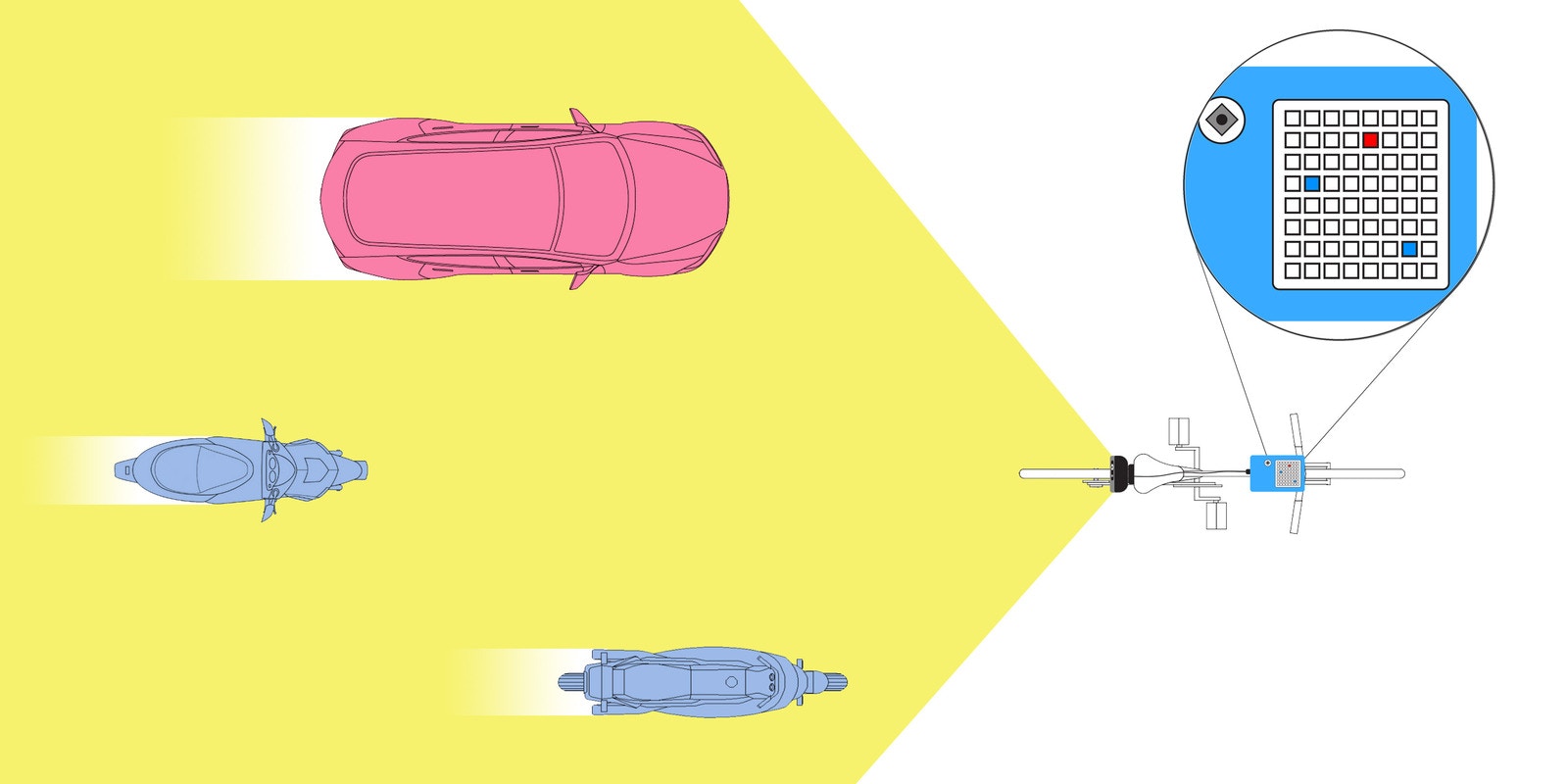
mul = {'motorcycle': 1.5, 'car': 1.0}[bb['label']]
ledx = max(0, min(7, floor((sqrt(bb['width'] * bb['height'] * mul) - 60) / -70 * 8 + 8)))
ledy = max(0, min(7, floor((bb['x'] + bb['width'] / 2) / 320 * 8)))
colours = {'motorcycle': (255, 255, 0), 'car': (255, 0, 0)}
colour = colours[bb['label']]
sense.set_pixel(ledx, ledy, colour)
if (show_camera):
cv2.imshow('edgeimpulse', cv2.cvtColor(img, cv2.COLOR_RGB2BGR))
if cv2.waitKey(1) == ord('q'):
break