Introduction
Human-Computer Interfaces come in many shapes and sizes in our everyday life. We’re greatly accustomed to point-and-click devices, touchscreens and voice commands. In recent years (and even more since the beginning of the pandemic), touchless interfaces have grown in popularity and have proven to work well in different use-cases: Among the many technologies that enable touchless interfaces, one that is low power and suitable for the embedded industry is known as “Time of Flight”. Time of Flight measures the distance of objects from the sensor, either via direct or indirect measurement. Arranged in a matrix scheme, these sensors can be used as a depth imaging system, making it possible to extract useful knowledge about the nearby environment. There are many types available in the market, but this project employs a VL53L5CX chip from ST Microelectronics, which is capable of producing an 8x8 distance array at 15 FPS. You can buy a development board for it with I2C connectivity for easy prototyping from many online resellers. The main objective of this project is to recognize user gestures from the sensor imaging data. The gestures can either be:- of “fixed” length, like a swipe (Project A)
- or continuous motion, like waving your hand (Project B)
Hardware and Software Setup
To implement this project on your own, you will need:- a board supported by Edge Impulse (I’m using an Arduino RP2040 Connect)
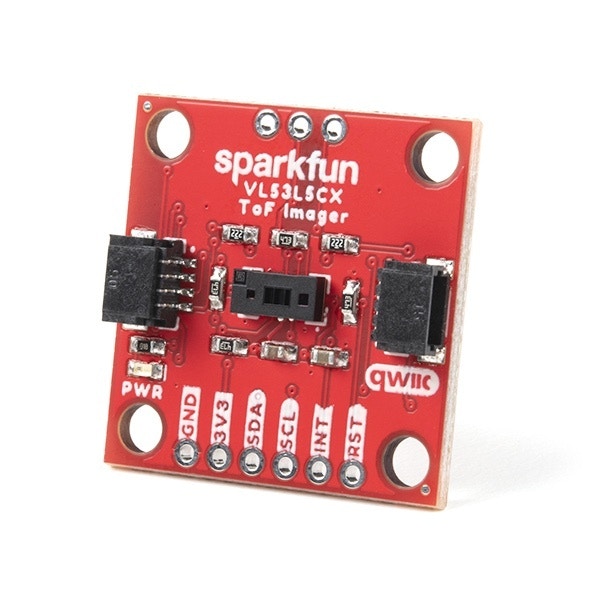
- a VL53L5CX 8x8 Time of Flight sensor
- SparkFun_VL53L5CX_Arduino_Library for direct access to the VL53L5CX sensor
- EloquentArduino library for high level VL53L5CX data manipulation
Hardware and Software Check
Once you’re done with the setup, let’s check that everything is wired correctly and that you can access the VL53L5CX sensor from the EloquentArduino library. Load this demo sketch on your board and confirm that you’re not getting any error messages.vl53l5cx not found message, first thing you should check is the wiring.
Otherwise, if everything is working fine, it’s time to start creating our dataset for model training and testing.
We begin from Project A: Fixed Length Gestures.
Project A. Fixed-Length Gestures
Fixed-length gestures have a clear beginning and a clear ending. They start when our hand enters the field of view of the sensor and end when our hand exits the field of view. This means that, first and foremost, we need to detect when something is in the field of view of the VL53L5CX and when not. The EloquentArduino library implements this basic check by testing each of the 64 distances that the sensor captures: if N (configurable) of them are below a given threshold, it returns true. Otherwise it returns false. Examples of fixed-length gestures are swipe left/right, swipe up/down and tap (approximate to the sensor then leave).Data Collection
To collect our dataset, we’ll configure this kind of object detection and we’ll print the sensor readings only when something is in the field of view.vllcx.printTo(Serial) line prints the sensor data to the Serial port in CSV format, so we can use the edge-impulse-data-forwarder tool to load our data directly into the Edge Impulse Studio.
Load the sketch and start edge-impulse-data-forwarder: now choose a gesture that you can perform in about 0.5 - 1 seconds and start iterating in front of the sensor.
For optimal accuracy, you should repeat each gesture at least 50 times. It will be even better if different people perform it, so as to capture more intra-gesture variability. (For the sake of this project, though, 30 repetitions of each should suffice)
After you finish collecting data, you can move on the Impulse design.
Impulse Design
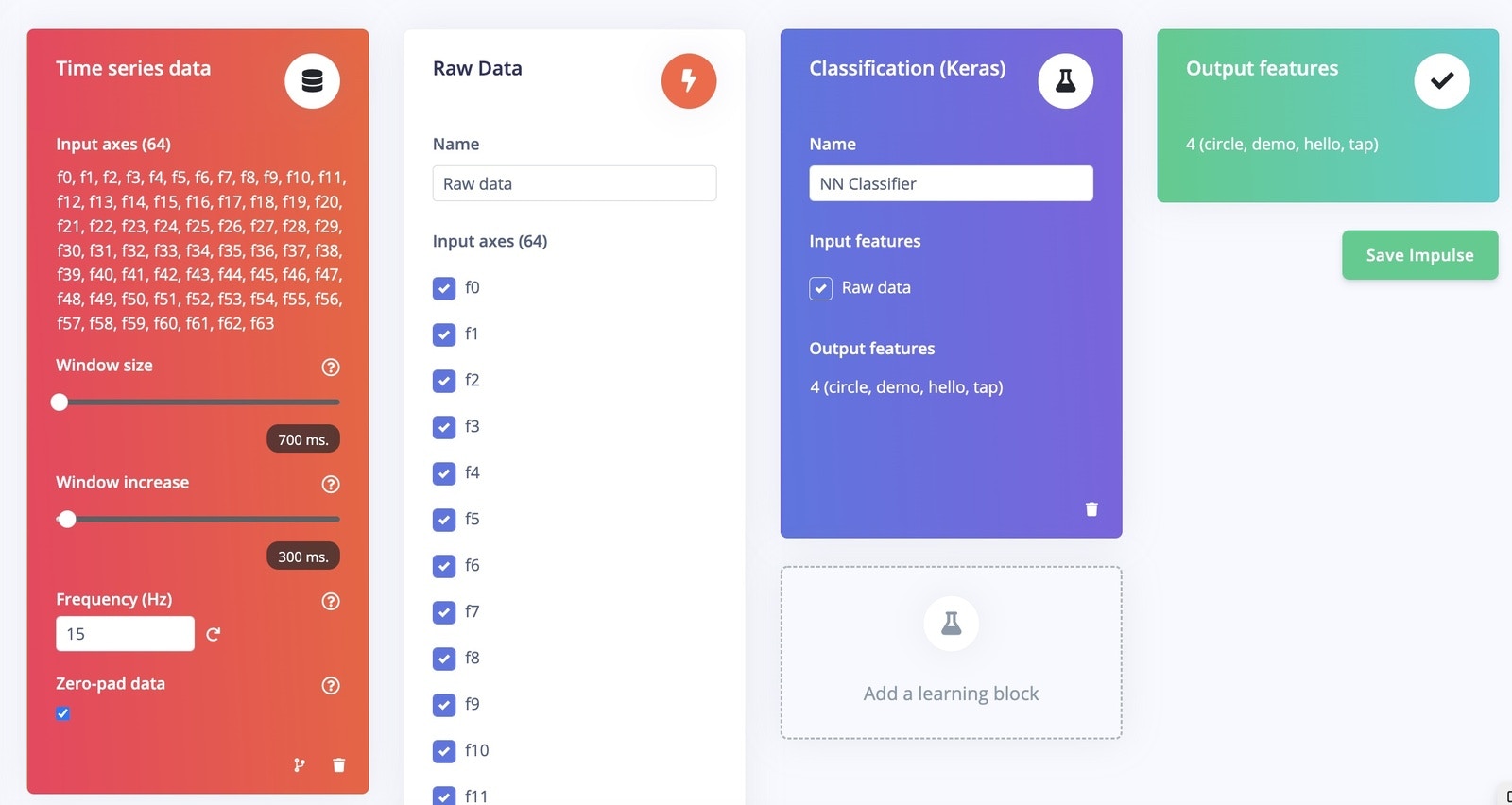
If we consider a single sensor array capture as an 8x8 matrix, we can (conceptually) assimilate it to a grayscale image. Since each gesture is made of many frames, our features are, in fact, a time series of images. As you may already know, when working with images Convolutional Neural Networks (CNN) on the raw pixel values, without much pre-processing (apart from data augmentation, if any), proved to work really well. Even though our “images” are pretty tiny, the 2D convolution approach will still suit our needs. Keeping this in mind, we will design our Impulse as follows:- Window size of 700 ms with 300 ms overlap (change according to your requirements!)
- Raw data processing block
- CNN made of:
- Input layer
- reshape to 8 columns
- 2D conv with 8 filters
- Dropout at 0.2
- 2D conv with 16 filters
- Dropout at 0.2
- Flatten
- Output layer
Deployment
After you have tweaked the model to fit your requirements, it is time to deploy it back to your board. The Edge Impulse library contains a few skeleton sketches for a supported list of sensors, but the VL53L5CX is not one of them, so we need to write the acquisition and inference logic by ourselves. The EloquentArduino library comes in handy once again here. Other than a VL53L5CX wrapper, it also implements acircular buffer data structure that we can use to replicate the Edge Impulse windowing function without hassle.
Once we fill the buffer, we can feed it as input to the Edge Impulse network and get the predictions back.
FloatCircularBuffer is a data structure that holds an array where you can push new values. When the buffer is full, it shifts the old elements to make room for the new ones. This way, you an an “infinite” buffer that mimics the windowing scheme of Edge Impulse.
By allocating a buffer of EI_CLASSIFIER_DSP_INPUT_FRAME_SIZE items, you are always sure that the impulse model will get the exact number of features it needs to perform inference.
That completes the Fixed-Length Gesture Project. You can have a look at a video of this project, here:
[[@todo add demo video here]]
The next project follows the same guidelines of this one, but implements a few changes that allow you to perform gesture inference on continuous data, instead of discrete as this one.
One main change is the introduction of a voting mechanism to make more robust predictions in sequence.
Project B. Continuous-Motion Gestures
Continuous-motion gesture detection behaves a bit differently from the discrete case. This time the model has to classify a stream of gestures, instead of one at a time. The application code we already discussed in the previous project will still remain valid, but we will introduce a few modifications:- we change the object detection logic
- we add a voting mechanism to smooth the stream of predictions and make it less noisy
Data Collection
The data collection sketch is pretty much the same as earlier. The only modification is the object detection algorithm: instead of checking if N out of 64 values are below a given threshold, we check if the mean value of the readings is below a threshold. The core idea here is that if no object is present, all the distances will map to 1 (max distance). If an object is in the field of view, some of the values will be lower, and so will be the mean value.edge-impulse-data-forwarder tool and collect your own dataset.
In this case I suggest you collect at least 60 seconds of continuous motion for each gesture to get good results.
Impulse Design
Nothing needs to be changed here.Deployment
As stated earlier, the main difference here is that we want to reduce the amount of noise in the predictions. By classifying a stream of data, it is very likely that once in a while the model will output wrong predictions due to the high variability of the input data. For example, it would be pretty normal that while performing gesture A, you see these kind of predictions from the model:AAAA B AAA C AAAA.
Our main goal is to eliminate those spot, isolated predictions.
A naive but effective strategy is to use a running voting scheme: every time a new prediction is made, we check the last few ones. If the latest agrees with the others, we can be more confident that it is accurate (this only applies in this case of continuous motion!).
The EloquentArduino library has such a voting scheme.
Conclusion
This project described two different kinds of gesture classification with Time of Flight technology:- Fixed-length gesture
- Continuous-motion gesture