import akida
import cv2
import math
import time
import signal
import threading
import numpy as np
from queue import Queue
from scipy.special import softmax
from flask import Flask, render_template, Response
app = Flask(__name__, static_folder='templates/assets')
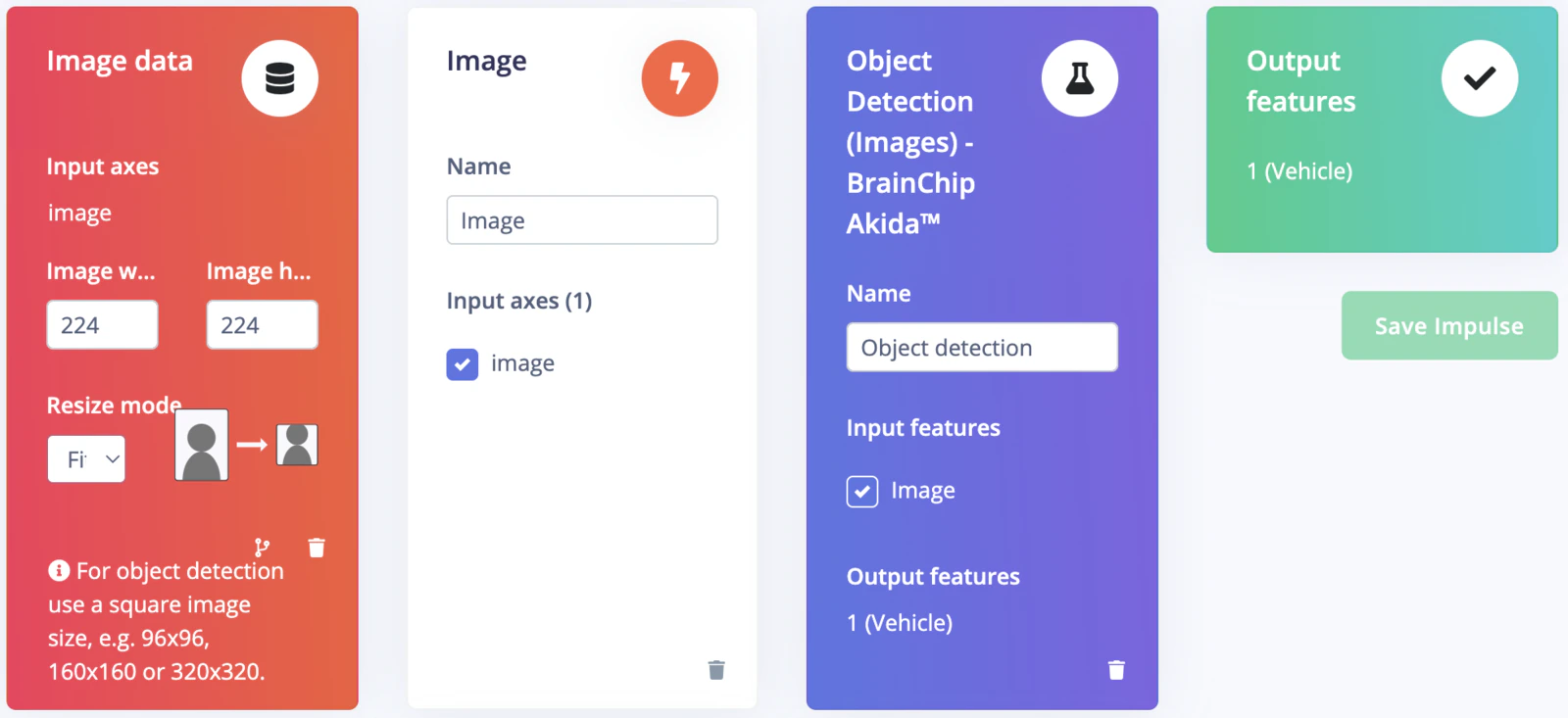
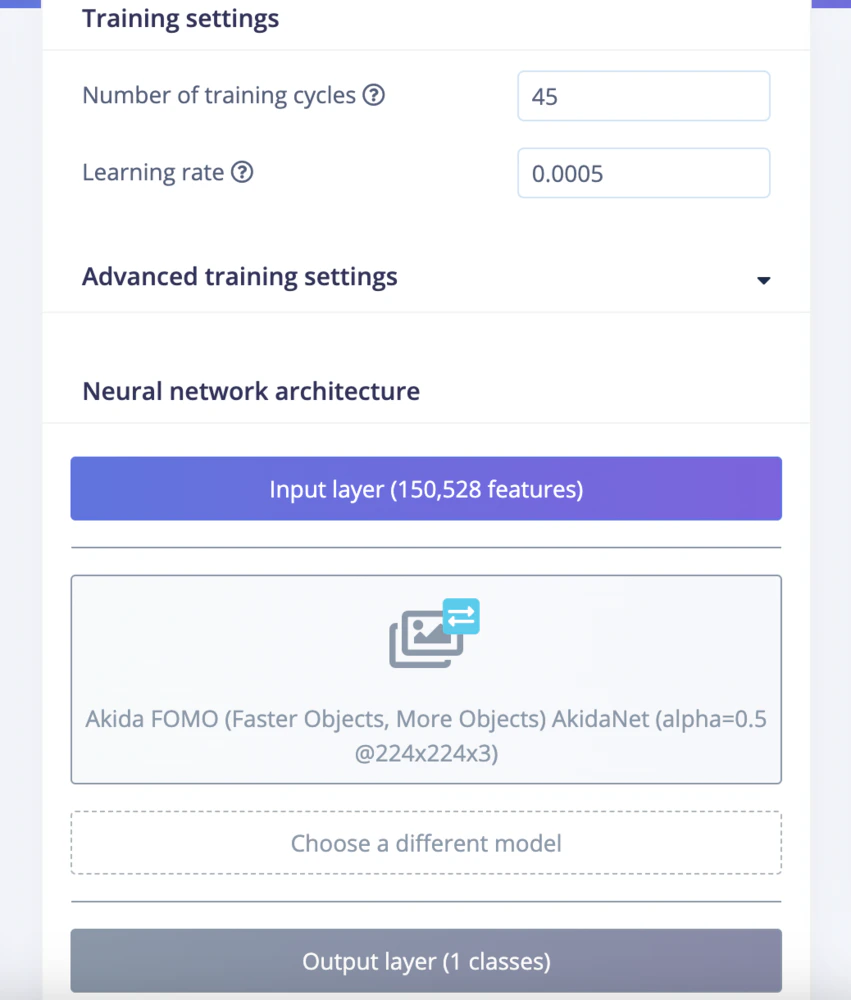
EI_CLASSIFIER_INPUT_WIDTH = 224
EI_CLASSIFIER_INPUT_HEIGHT = 224
EI_CLASSIFIER_LABEL_COUNT = 1
EI_CLASSIFIER_OBJECT_DETECTION_THRESHOLD = 0.95
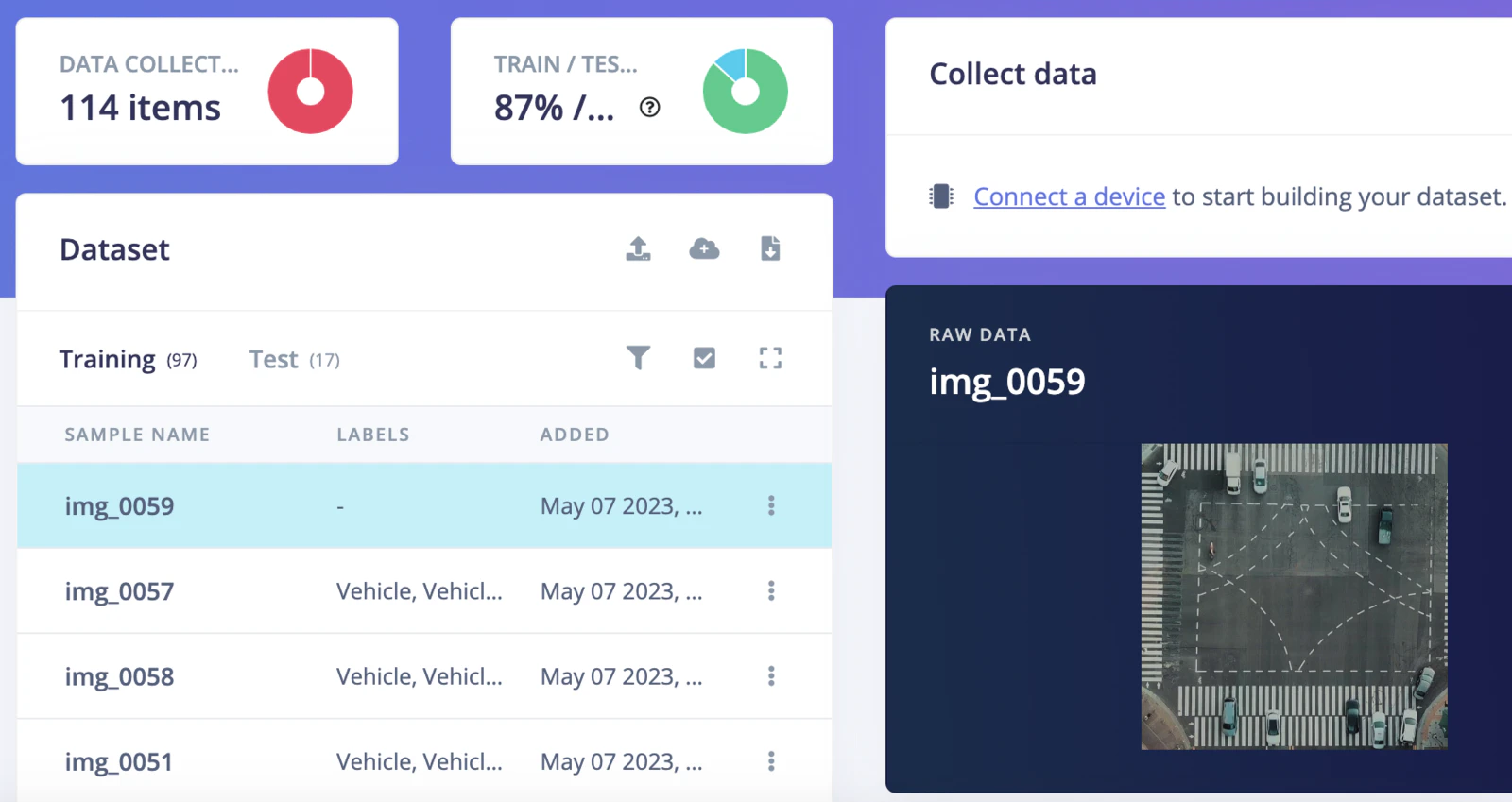
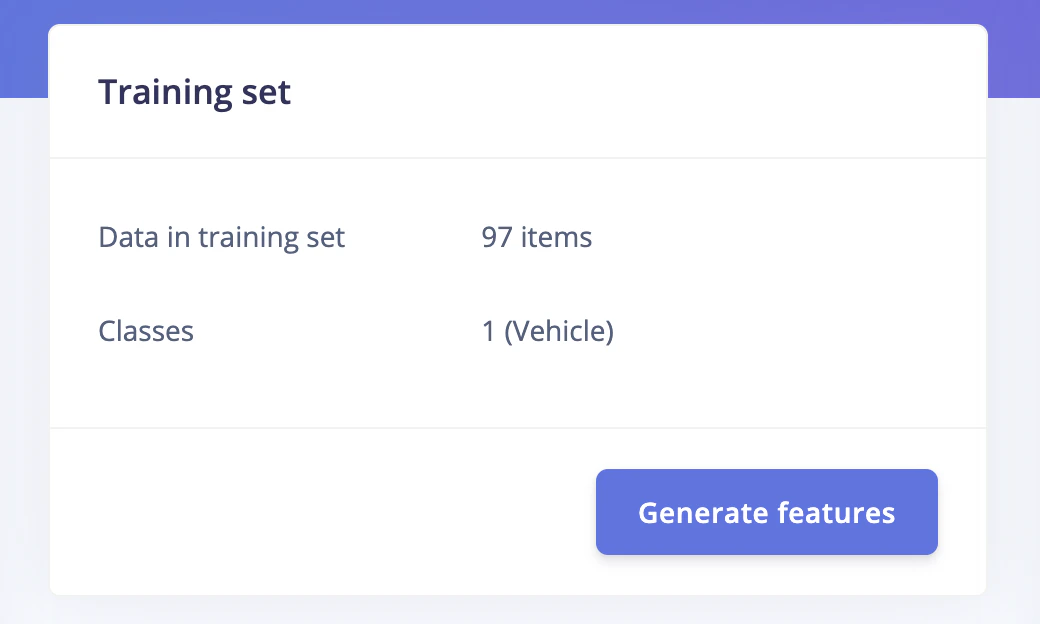
categories = ['Vehicle']
inference_speed = 0
power_consumption = 0
def ei_cube_check_overlap(c, x, y, width, height, confidence):
is_overlapping = not ((c['x'] + c['width'] < x) or (c['y'] + c['height'] < y) or (c['x'] > x + width) or (c['y'] > y + height))
if not is_overlapping:
return False
if x < c['x']:
c['x'] = x
c['width'] += c['x'] - x
if y < c['y']:
c['y'] = y;
c['height'] += c['y'] - y;
if (x + width) > (c['x'] + c['width']):
c['width'] += (x + width) - (c['x'] + c['width'])
if (y + height) > (c['y'] + c['height']):
c['height'] += (y + height) - (c['y'] + c['height'])
if confidence > c['confidence']:
c['confidence'] = confidence
return True
def ei_handle_cube(cubes, x, y, vf, label, detection_threshold):
if vf < detection_threshold:
return
has_overlapping = False
width = 1
height = 1
for c in cubes:
# not cube for same class? continue
if c['label'] != label:
continue
if ei_cube_check_overlap(c, x, y, width, height, vf):
has_overlapping = True
break
if not has_overlapping:
cube = {}
cube['x'] = x
cube['y'] = y
cube['width'] = 1
cube['height'] = 1
cube['confidence'] = vf
cube['label'] = label
cubes.append(cube)
def fill_result_struct_from_cubes(cubes, out_width_factor):
result = {}
bbs = [];
results = [];
added_boxes_count = 0;
for sc in cubes:
has_overlapping = False;
for c in bbs:
# not cube for same class? continue
if c['label'] != sc['label']:
continue
if ei_cube_check_overlap(c, sc['x'], sc['y'], sc['width'], sc['height'], sc['confidence']):
has_overlapping = True
break
if has_overlapping:
continue
bbs.append(sc)
results.append({
'label' : sc['label'],
'x' : int(sc['x'] * out_width_factor),
'y' : int(sc['y'] * out_width_factor),
'width' : int(sc['width'] * out_width_factor),
'height' : int(sc['height'] * out_width_factor),
'value' : sc['confidence']
})
added_boxes_count += 1
result['bounding_boxes'] = results
result['bounding_boxes_count'] = len(results)
return result
def fill_result_struct_f32_fomo(data, out_width, out_height):
cubes = []
out_width_factor = EI_CLASSIFIER_INPUT_WIDTH / out_width;
for y in range(out_width):
for x in range(out_height):
for ix in range(1, EI_CLASSIFIER_LABEL_COUNT + 1):
vf = data[y][x][ix];
ei_handle_cube(cubes, x, y, vf, categories[ix - 1], EI_CLASSIFIER_OBJECT_DETECTION_THRESHOLD);
result = fill_result_struct_from_cubes(cubes, out_width_factor)
return result
def capture(video_file, queueIn):
cap = cv2.VideoCapture(video_file)
fps = cap.get(cv2.CAP_PROP_FPS)
num_frames = cap.get(cv2.CAP_PROP_FRAME_COUNT)
resize_dim = (EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT)
if not cap.isOpened():
print("File not opened")
sys.exit(1)
while True:
ret, frame = cap.read()
if ret:
#cropped_img = frame[0:720, 280:280+720]
#resized_img = cv2.resize(frame, resize_dim, interpolation = cv2.INTER_AREA)
resized_img = cv2.resize(frame, resize_dim)
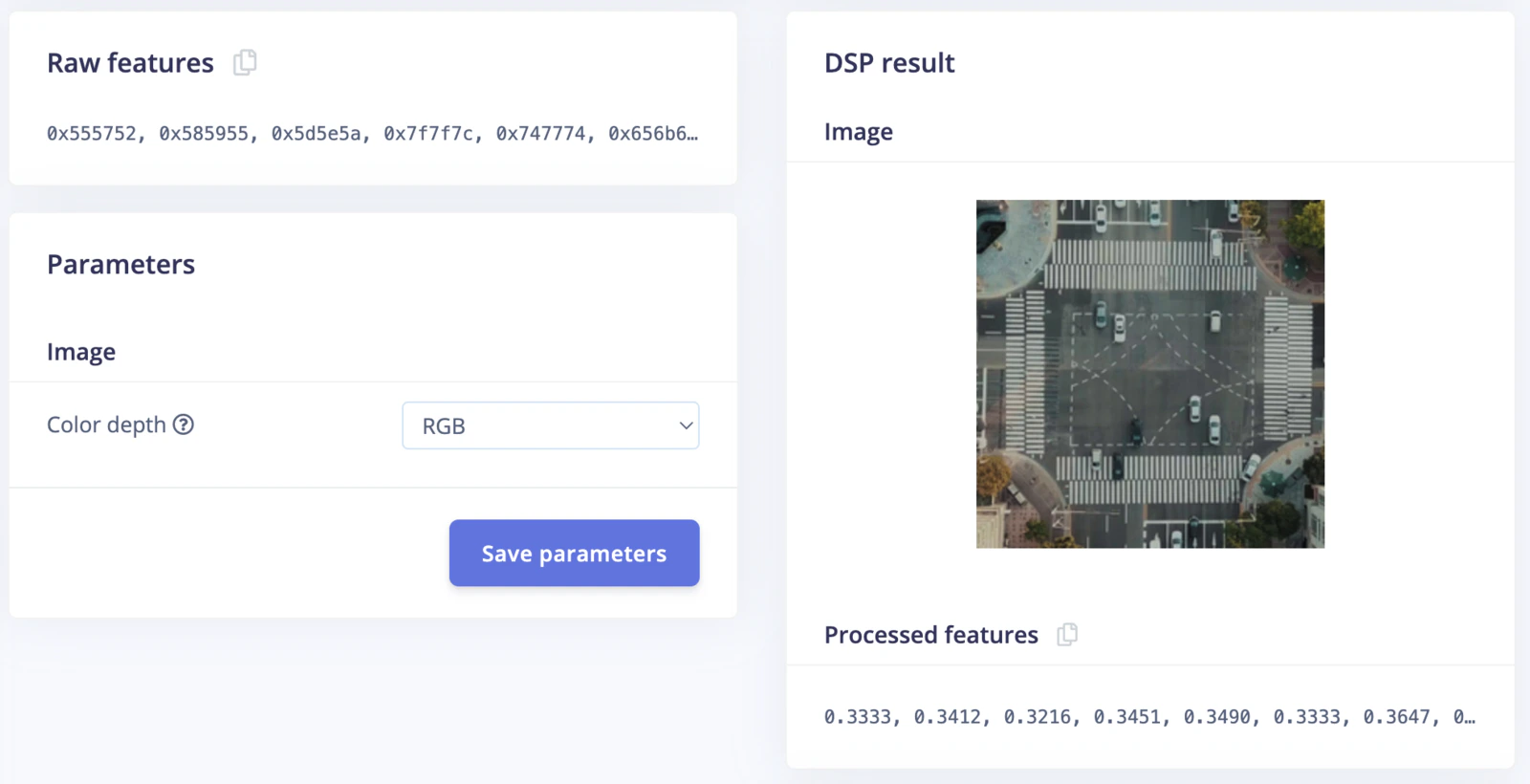
img = cv2.cvtColor(resized_img, cv2.COLOR_BGR2RGB)
input_data = np.expand_dims(img, axis=0)
if not queueIn.full():
queueIn.put((frame, input_data))
else:
return
def inferencing(model_file, queueIn, queueOut):
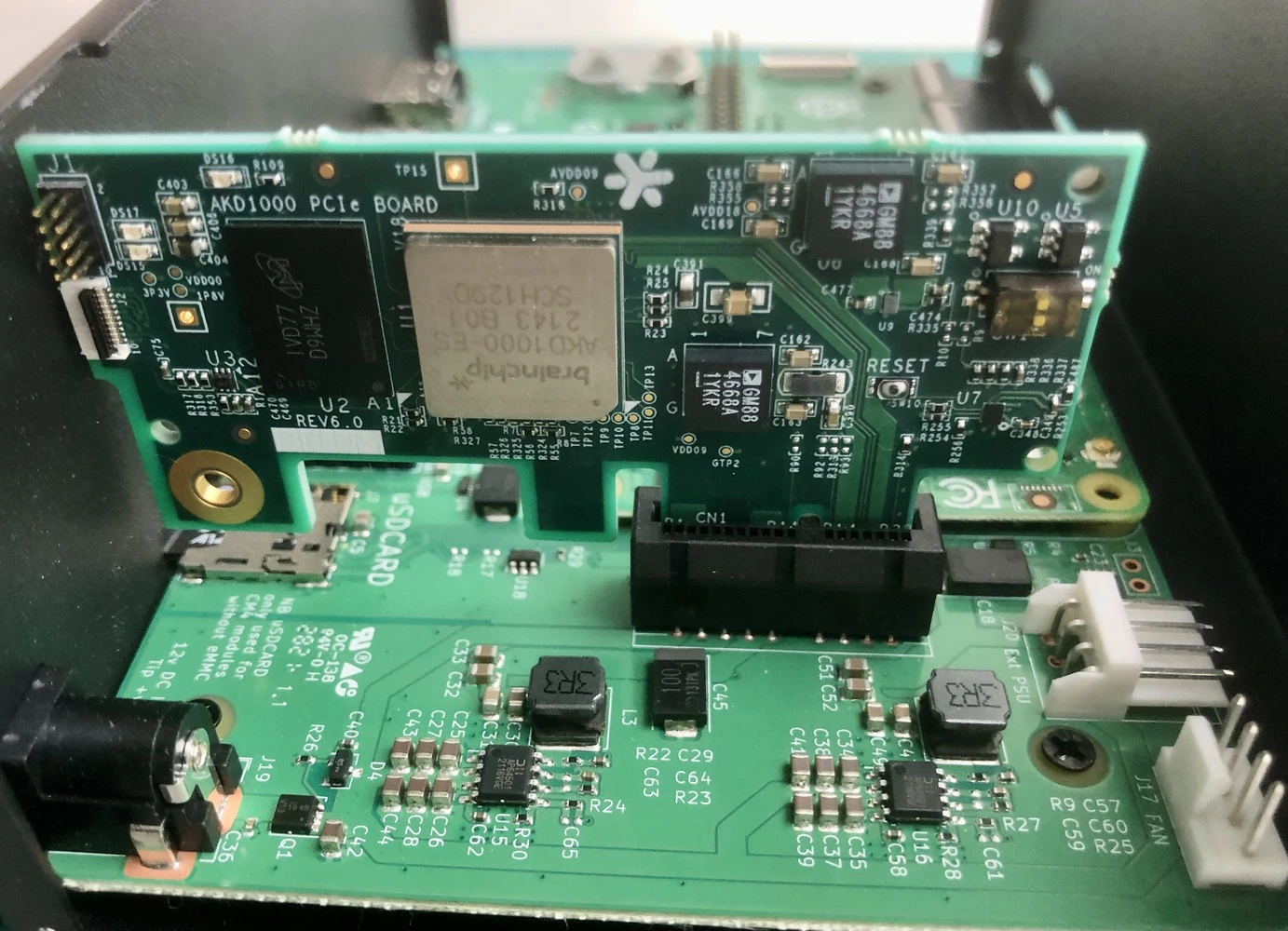
akida_model = akida.Model(model_file)
devices = akida.devices()
print(f'Available devices: {[dev.desc for dev in devices]}')
device = devices[0]
device.soc.power_measurement_enabled = True
akida_model.map(device)
akida_model.summary()
i_h, i_w, i_c = akida_model.input_shape
o_h, o_w, o_c = akida_model.output_shape
scale_x = int(i_w/o_w)
scale_y = int(i_h/o_h)
scale_out_x = 1280/EI_CLASSIFIER_INPUT_WIDTH
scale_out_y = 1280/EI_CLASSIFIER_INPUT_HEIGHT
global inference_speed
global power_consumption
while True:
if queueIn.empty():
#print("queue empty, wait a while")
time.sleep(0.01)
continue
img, input_data = queueIn.get()
start_time = time.perf_counter()
logits = akida_model.predict(input_data)
end_time = time.perf_counter()
inference_speed = (end_time - start_time) * 1000
pred = softmax(logits, axis=-1).squeeze()
floor_power = device.soc.power_meter.floor
power_events = device.soc.power_meter.events()
active_power = 0
for event in power_events:
active_power += event.power
power_consumption = f'{(active_power/len(power_events)) - floor_power : 0.2f}'
#print(akida_model.statistics)
result = fill_result_struct_f32_fomo(pred, int(EI_CLASSIFIER_INPUT_WIDTH/8), int(EI_CLASSIFIER_INPUT_HEIGHT/8))
for bb in result['bounding_boxes']:
img = cv2.circle(img, (int((bb['x'] + int(bb['width']/2)) * scale_out_x), int((bb['y'] + int(bb['height']/2)) * scale_out_y)), 14, (57, 255, 20), 3)
img = cv2.circle(img, (int((bb['x'] + int(bb['width']/2)) * scale_out_x), int((bb['y'] + int(bb['height']/2)) * scale_out_y)), 8, (255, 165, 0), 3)
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if not queueOut.full():
queueOut.put(img)
def gen_frames():
while True:
if queueOut.empty():
time.sleep(0.01)
continue
img = queueOut.get()
ret, buffer = cv2.imencode('.jpg', img)
yield (b'--frame\r\n'
b'Content-Type: image/jpeg\r\n\r\n' + buffer.tobytes() + b'\r\n')
def get_inference_speed():
while True:
yield f"data:{inference_speed:.2f}\n\n"
time.sleep(0.1)
def get_power_consumption():
while True:
yield "data:" + str(power_consumption) + "\n\n"
time.sleep(0.1)
@app.route('/video_feed')
def video_feed():
#Video streaming route. Put this in the src attribute of an img tag
return Response(gen_frames(), mimetype='multipart/x-mixed-replace; boundary=frame')
@app.route('/model_inference_speed')
def model_inference_speed():
return Response(get_inference_speed(), mimetype= 'text/event-stream')
@app.route('/model_power_consumption')
def model_power_consumption():
return Response(get_power_consumption(), mimetype= 'text/event-stream')
@app.route('/')
def index():
return render_template('index.html')
if __name__ == '__main__':
video_file = './video/aerial_1280_1280.avi'
model_file = './model/ei-object-detection-metatf-model.fbz '
queueIn = Queue(maxsize = 24)
queueOut = Queue(maxsize = 24)
t1 = threading.Thread(target=capture, args=(video_file, queueIn))
t1.start()
t2 = threading.Thread(target=inferencing, args=(model_file, queueIn, queueOut))
t2.start()
app.run(host = '0.0.0.0', port = 8080)
t1.join()
t2.join()