Project Demo
Overview

Hardware Setup
This project requires high-speed inferencing in real-time to detect defects and assist the manufacturing process. The reComputer Jetson Xavier NX (8GB RAM) is used for development, and deployment as well. A 5-megapixel USB webcam is used to capture images. The headless reComputer is connected to a router using a USB WiFi dongle and is accessed using an SSH connection.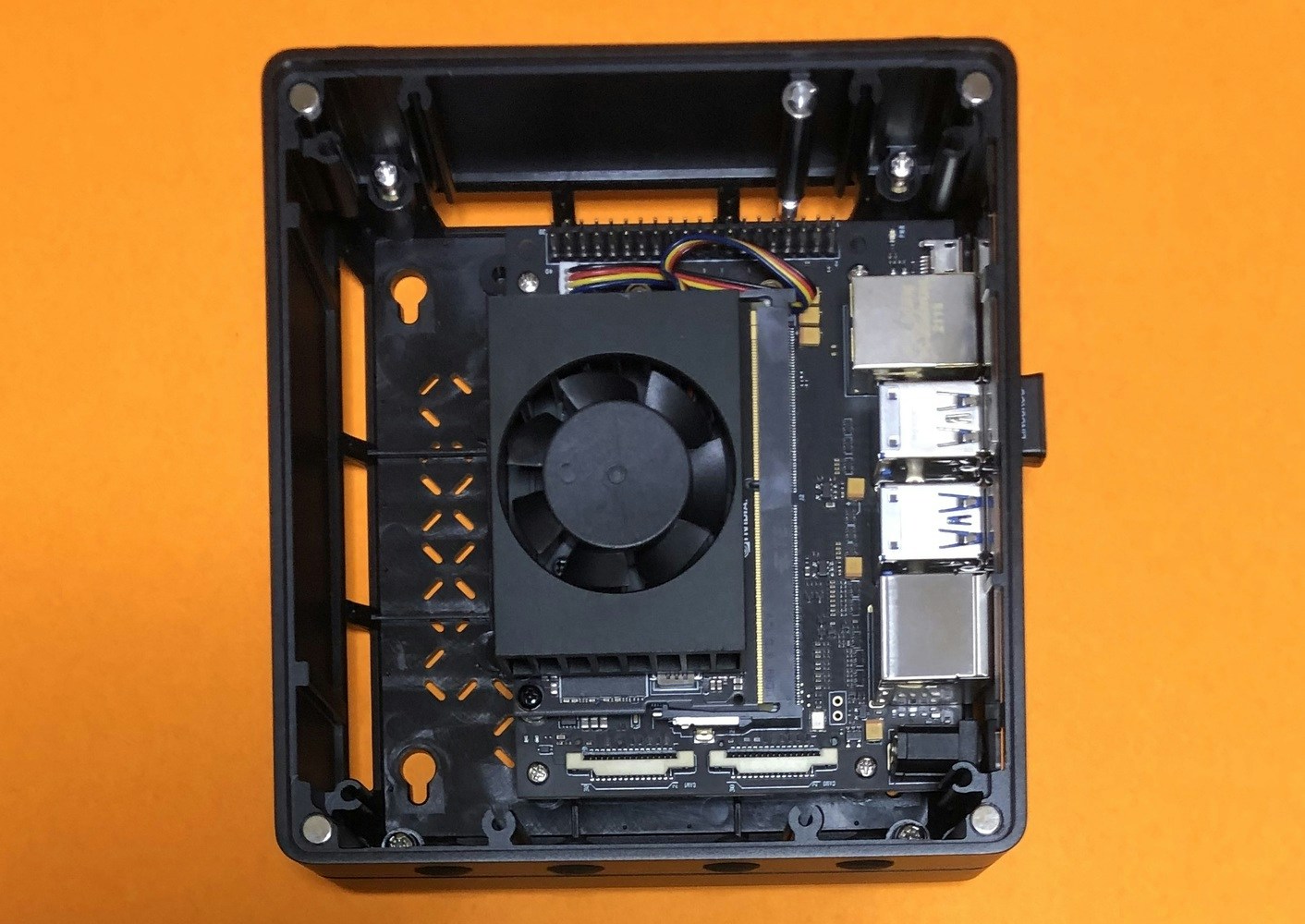
Set up Development Environment
The reComputer comes with Ubuntu 18.04 and JetPack 4.6.2 preinstalled. To set this device up in Edge Impulse,ssh to the device and run the following command in the terminal.
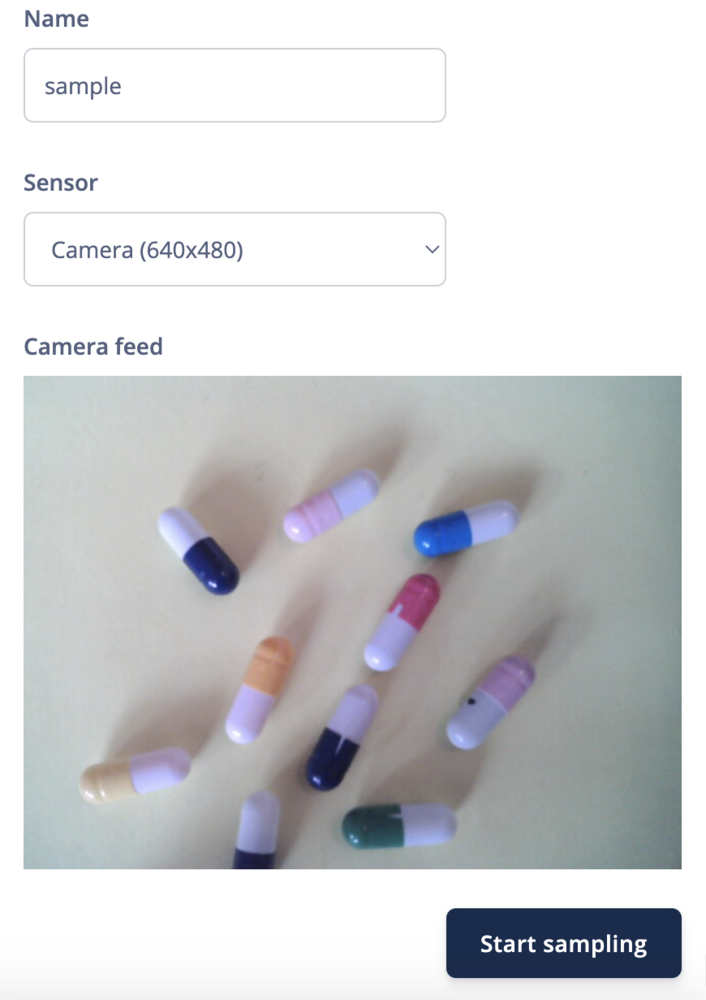
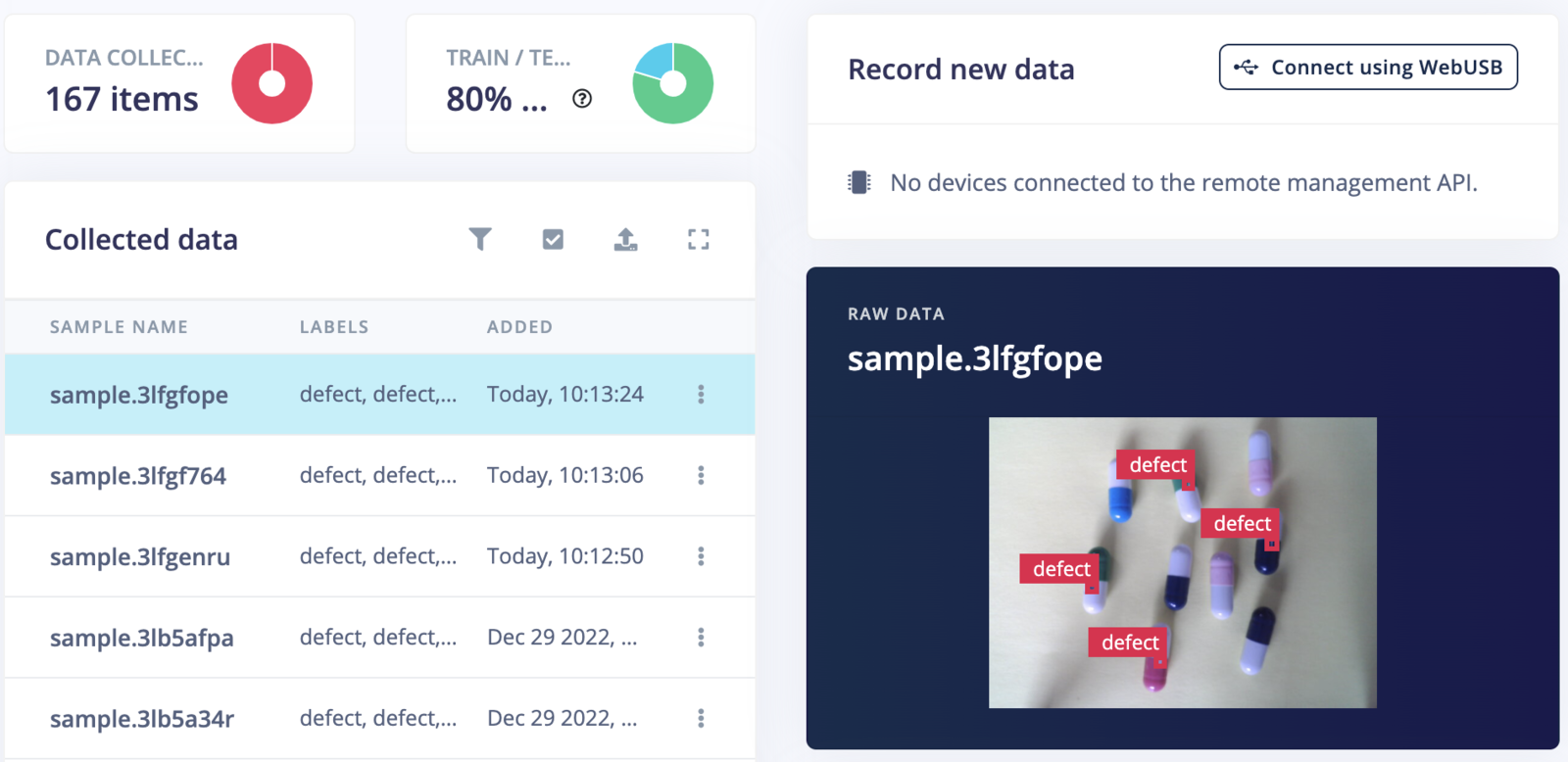
Data Collection
We are using a set of different color empty capsule shells for data generation. The pharmaceutical capsule shell consists of two pre-fabricated, cylindrical sections (a cap and a body) each of which has one rounded, closed-end and one open end. The body has a slightly lower diameter than the cap and fits inside the cap.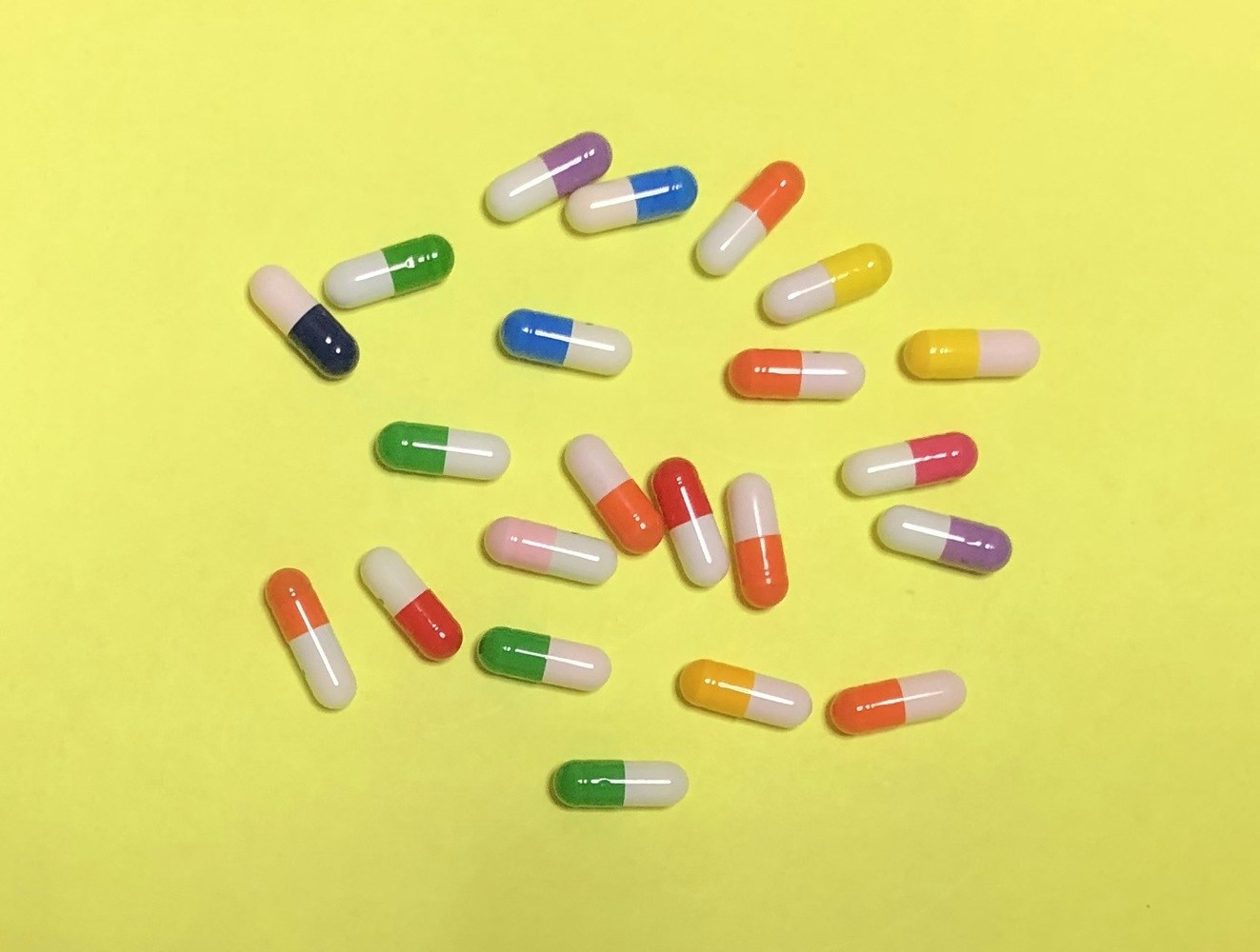
Model Training
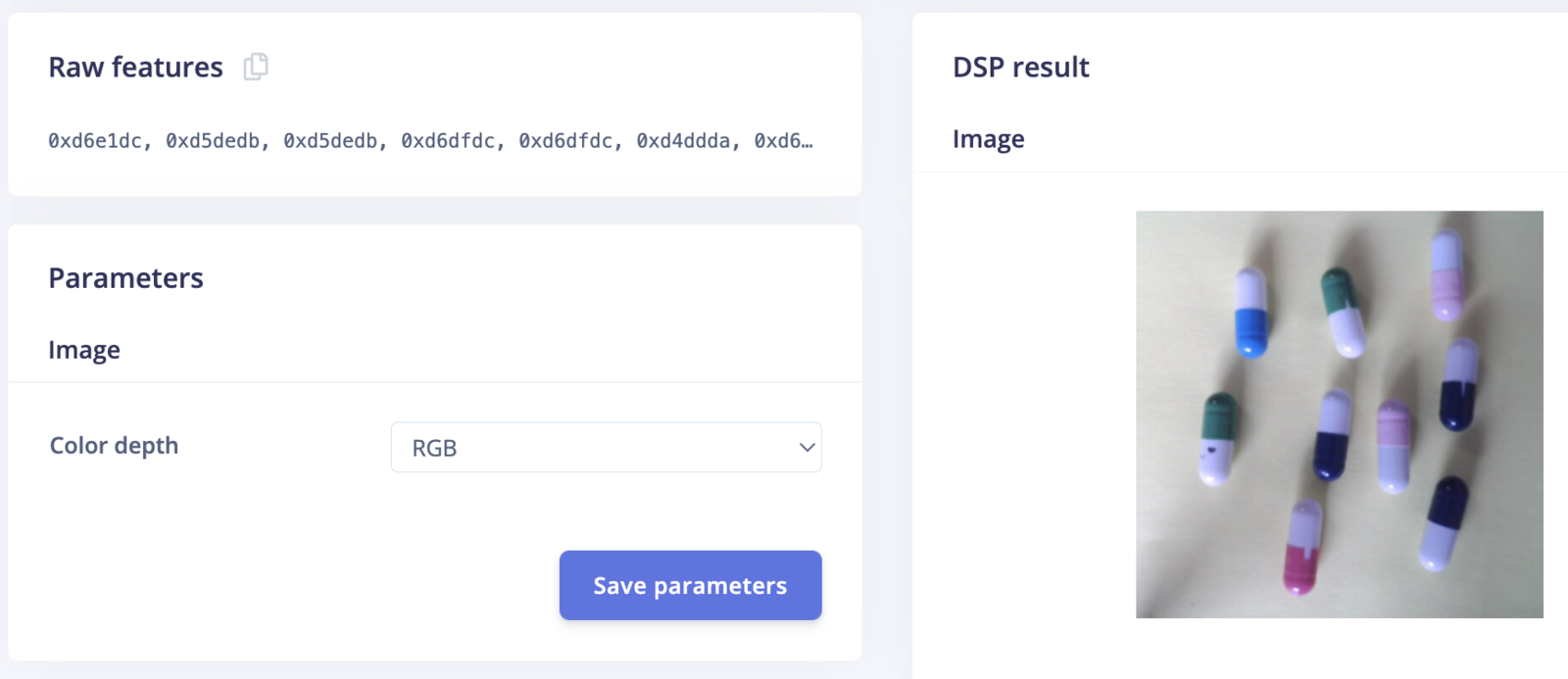
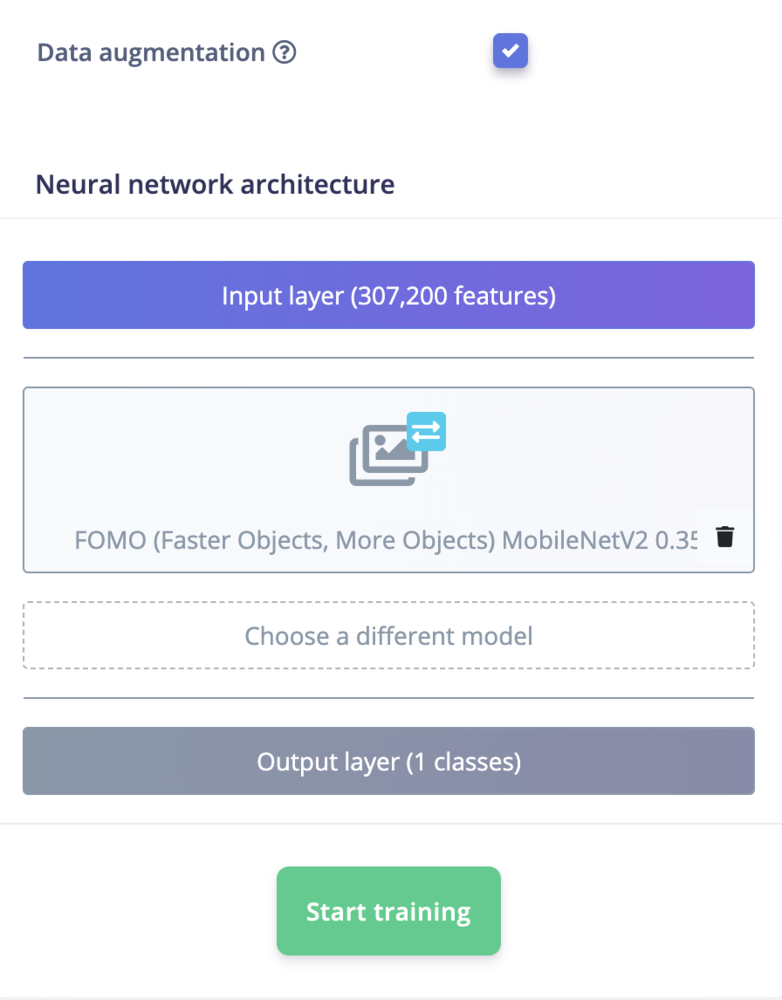
Go to the Impulse Design > Create Impulse page, click Add a processing block, and then choose Image, which preprocesses and normalizes image data, and optionally allows you to choose the color depth. Also, on the same page, click Add a learning block, and choose Object Detection (Images) which fine-tunes a pre-trained object detection model on your data. Since the defects are usually tiny, and knowing that the reComputer is a very powerful device, we are using a 320x320 image size for better resolution for detection. Now click on the Save Impulse button.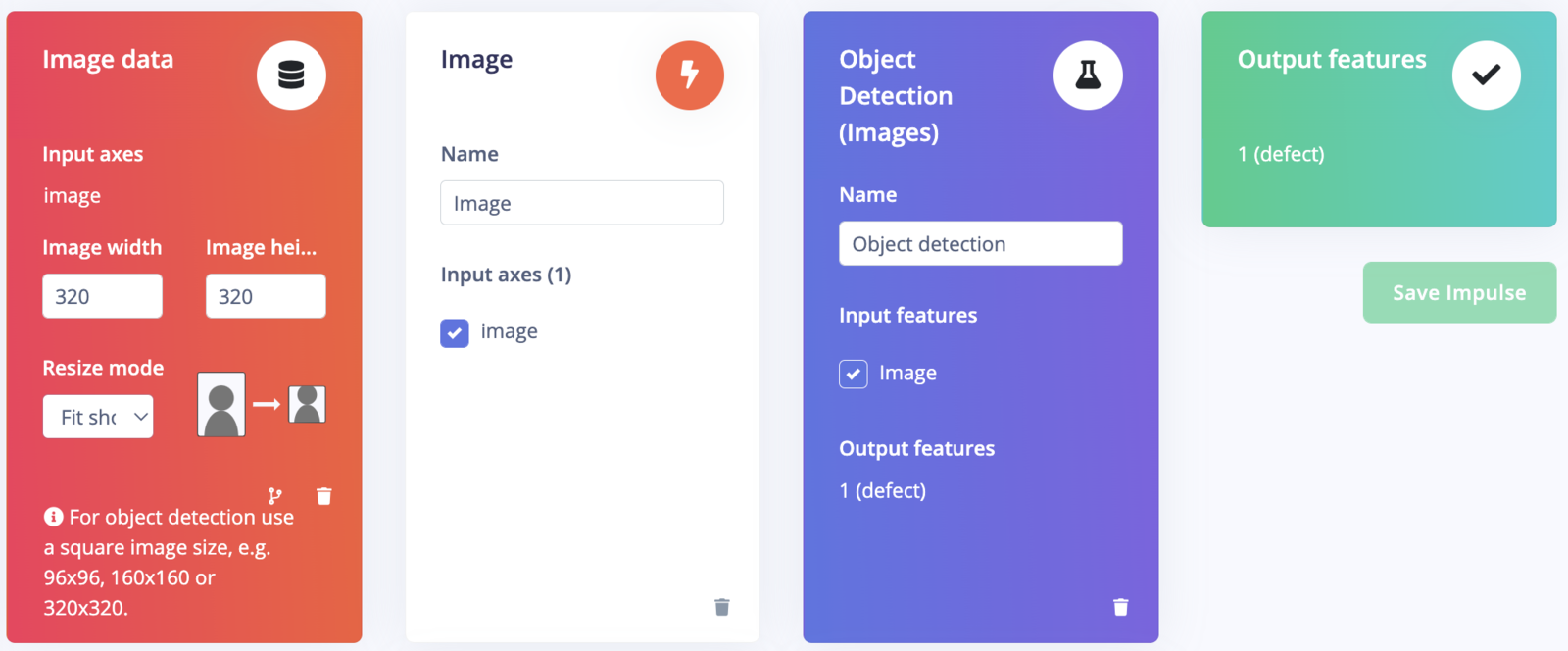
Why FOMO?
This project aims to use Edge Impulse Studio to collect data and train a model for the anomaly detection task. In the preliminary trials, the supported off-the-shelf image classification or object detection models perform poorly to detect tiny defects on the small capsules. Usually, Generative Adversarial Networks (GAN) or Autoencoder based models are used for anomaly detection for similar datasets. However, the Edge Impulse FOMO algorithm works quite well for the given task. FOMO uses an architecture similar to a standard image classification model which splits the input image into a grid and runs the equivalent of image classification across all cells in the grid independently in parallel. By default the grid size is 8x8 pixels, which means for a 320x320 image, the output will be 40x40 as shown in the image below.
Confusion Matrix
Once the training is completed we can see the confusion matrix as shown below. For the unoptimized float32 model, the F1 score is 98.3% which is very good.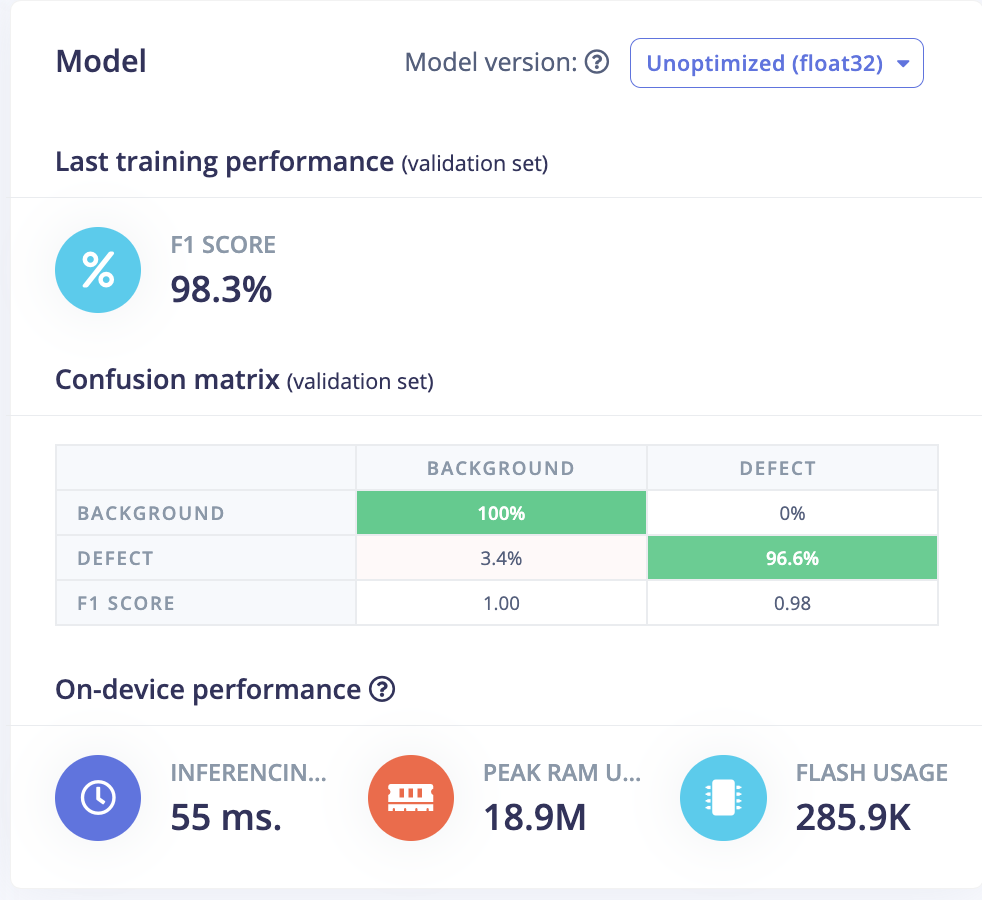
Model testing
In the Model testing page, click on the Classify all button which will initiate testing with the trained float32 model. The testing accuracy is 89.74%.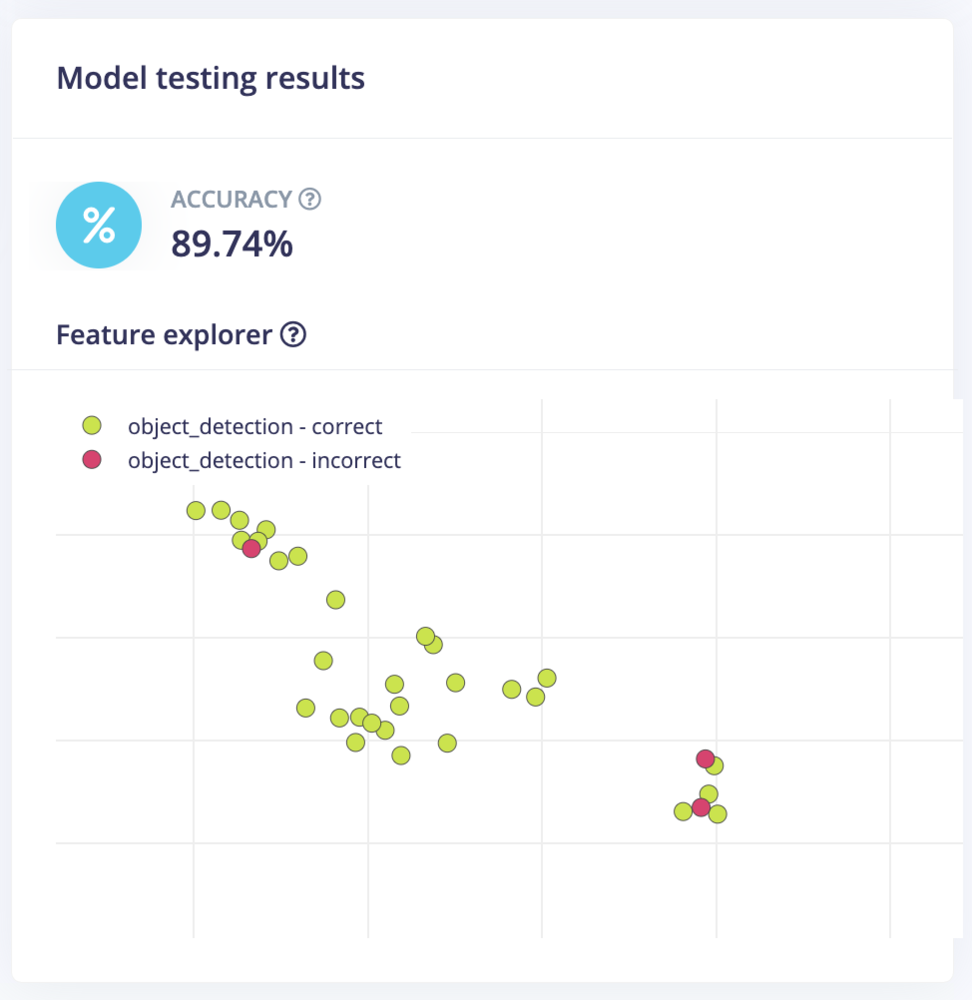
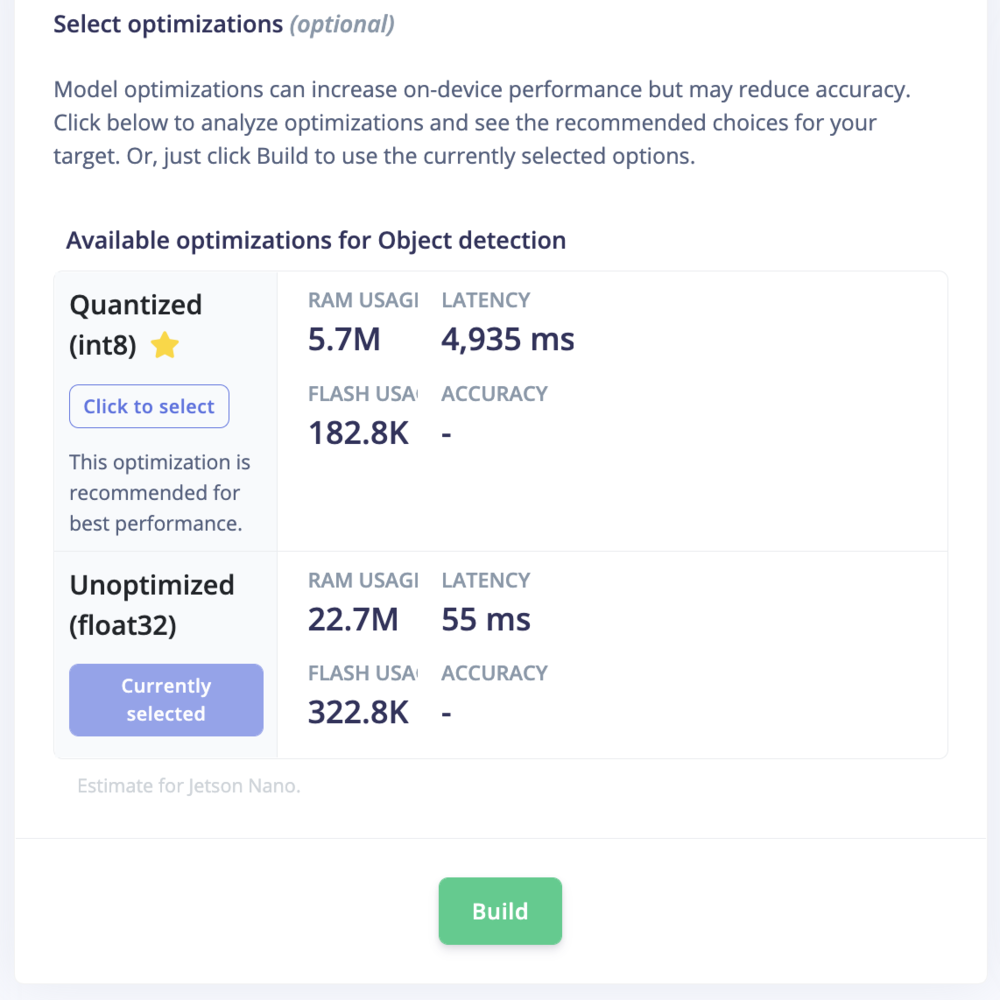
Model Deployment
To achieve the highest possible inferencing rate we will be running the model using the GPU on the Jetson Xavier NX. On the Deployment page, we will choose NVIDIA TensorRT Library from the Deploy your impulse section.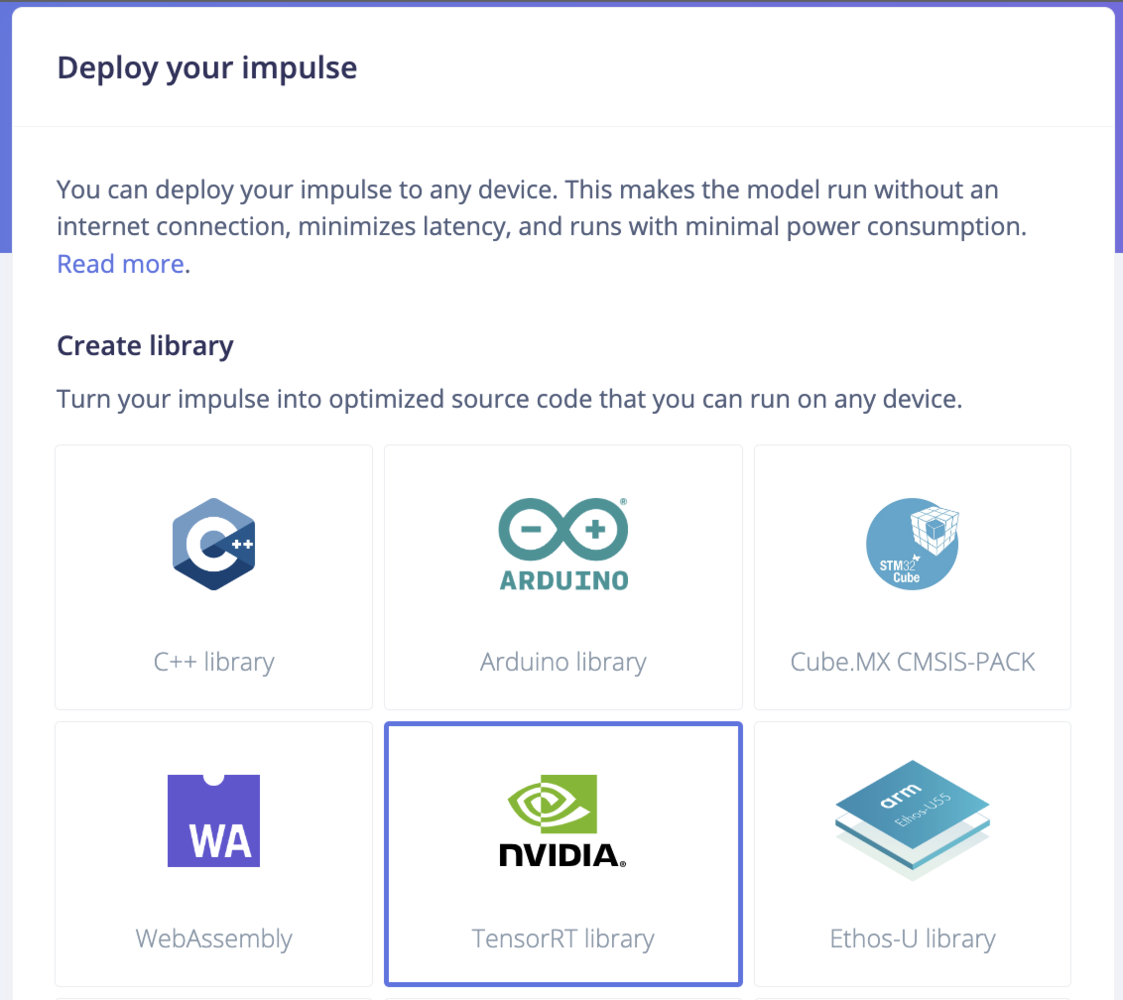
model.eim file will be generated in the build directory.
Run Inferencing
We will be using the Edge Impulse command line tools to run inferencing. Also, the Jetson Xavier NX power mode is changed to 20W (2 cores) for better utilization of the device.
