Introduction
Like many countries, the UK encourages people to cycle, with many cycle paths and cycle-to-work programs. Ideally for safety, the cycle paths are isolated from the main flow of traffic, and my home town of Harlow does pretty well at this.
Cycle Paths for my home town of Harlow, UK


What is FOMO
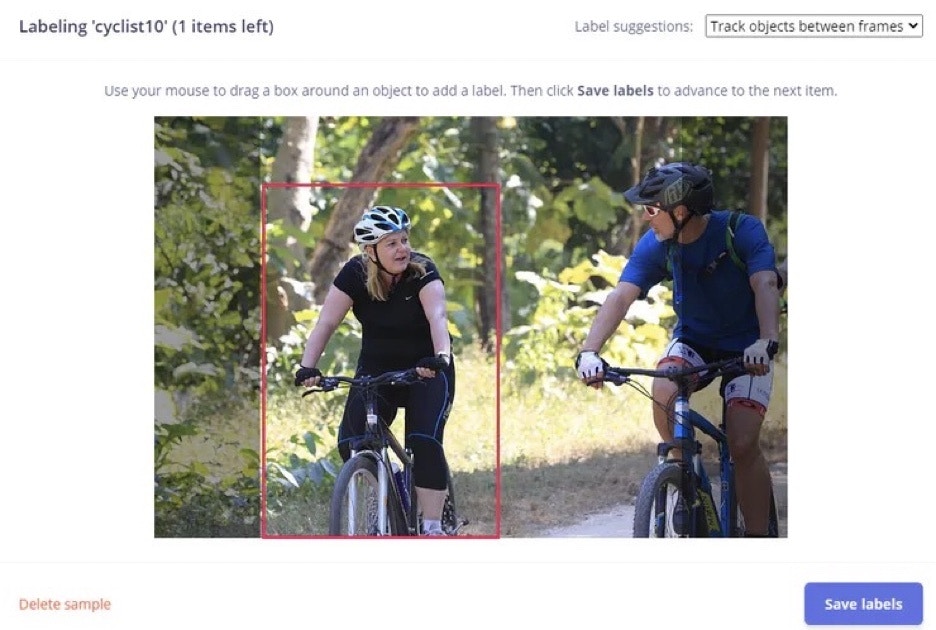
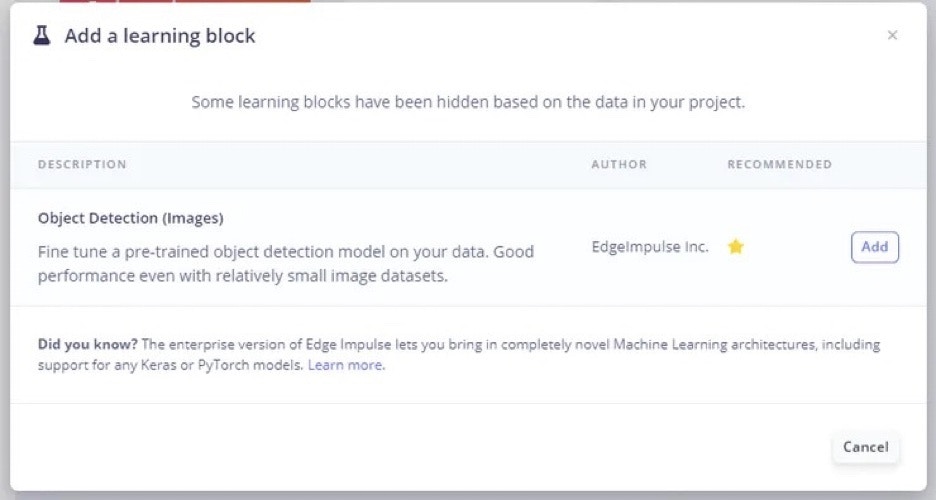
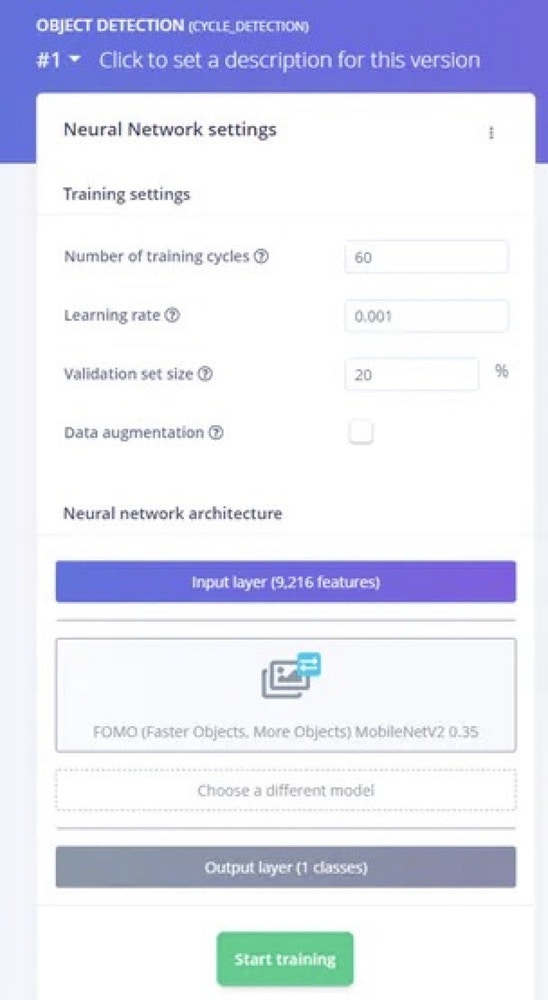
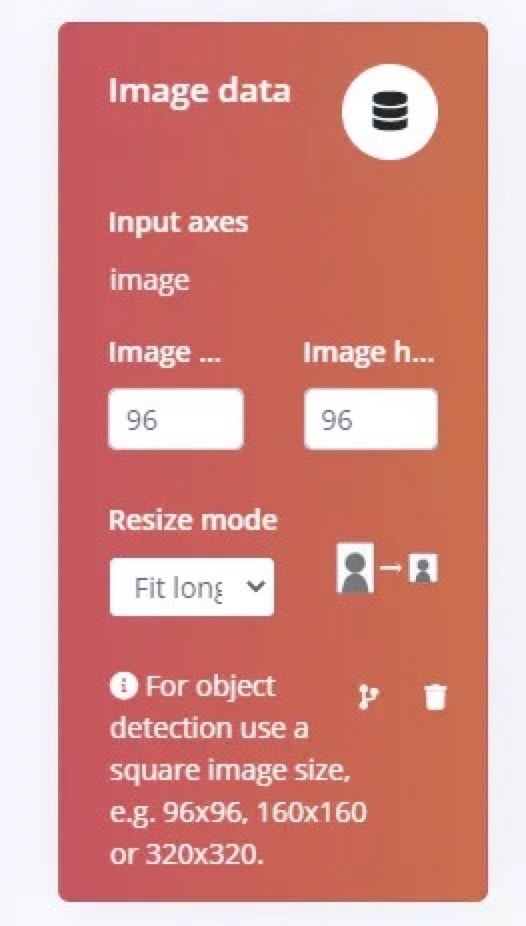
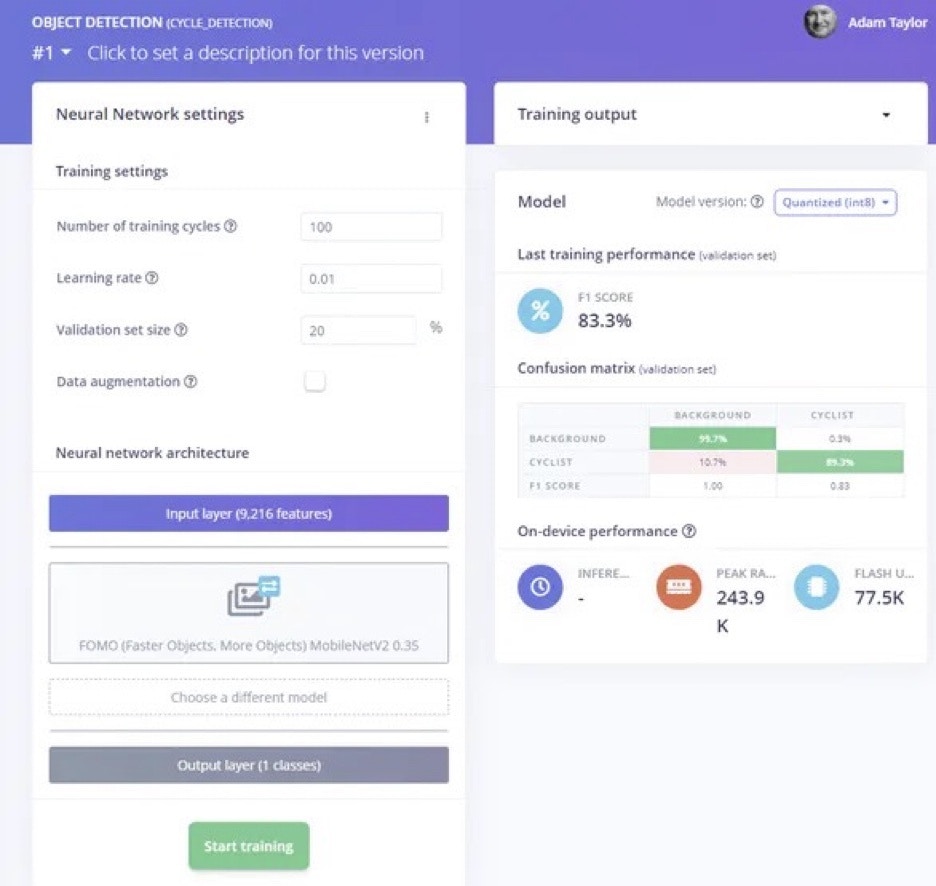
Image classification, where we say if an item is present in a image, works well as long as there is only a single object in the image. Alternatively, object detection is able to provide the class, number of objects and positions in the image. This is what we need for cyclist detection as real world conditions mean there will be many objects in the image and there may be several cyclists also in the same image. It is crucial when this occurs we do detect the cyclist, for this reason we need a object detection algorithm. However, object detection algorithms are very computationally intensive and therefore struggle to be as responsive as necessary for this use case on a microcontroller. This is where the FOMO algorithm developed by Edge Impulse comes into play, it provides a simplified version of object detection.Dataset
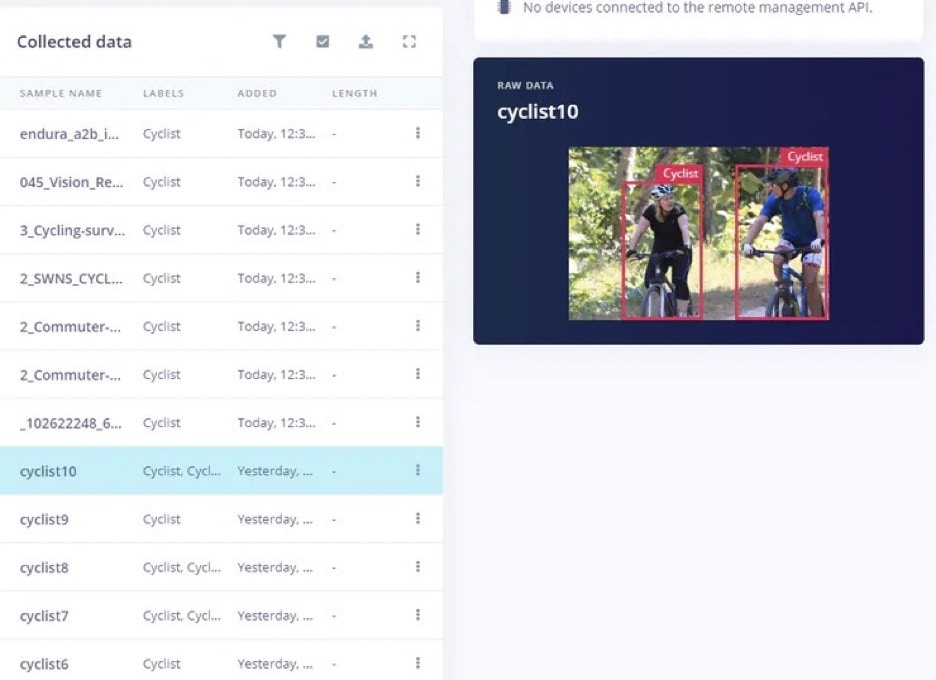
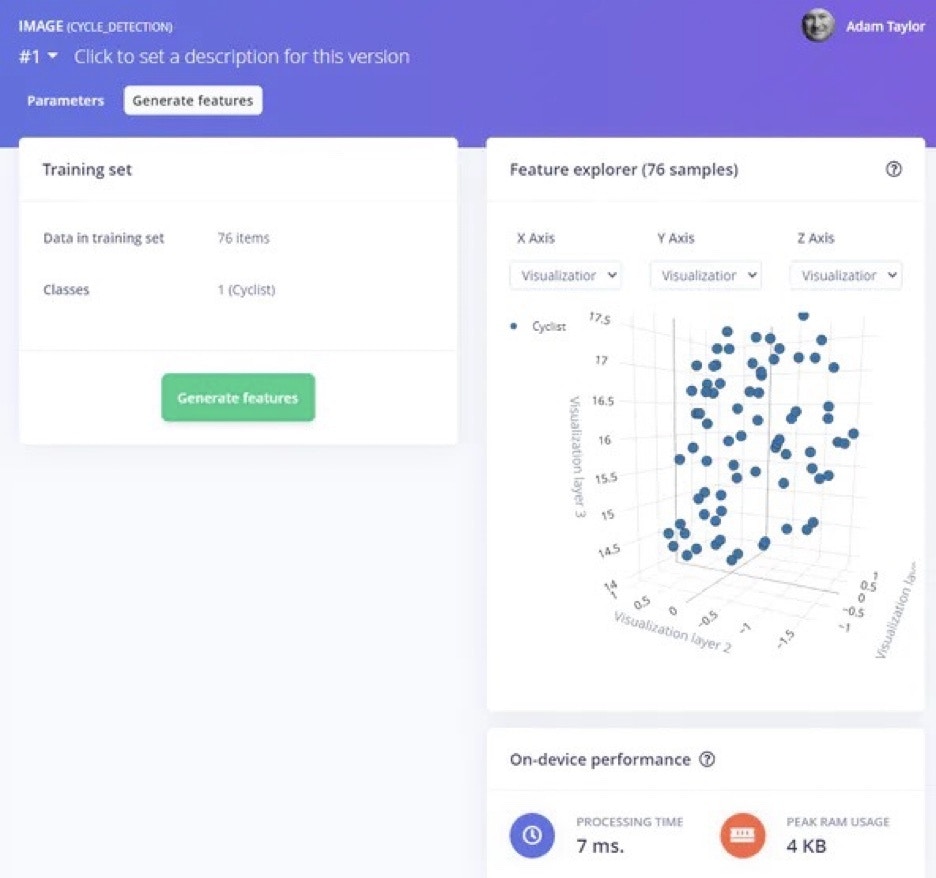
Like with all ML/AI projects, one of the largest challenges is in collecting a dataset. There is not a large, publicly available, dataset so we started to collect a small dataset to enable training and proof of concept. If the concept works we can create a larger dataset which addresses more conditions such as low light, weather, etc. The initial dataset used consisted of 100 images of cyclists in different conditions tagged from around the world. These images were collected from open source images available across the web. Once the dataset is collected we are able to create the Edge Impulse project.Edge Impulse Project
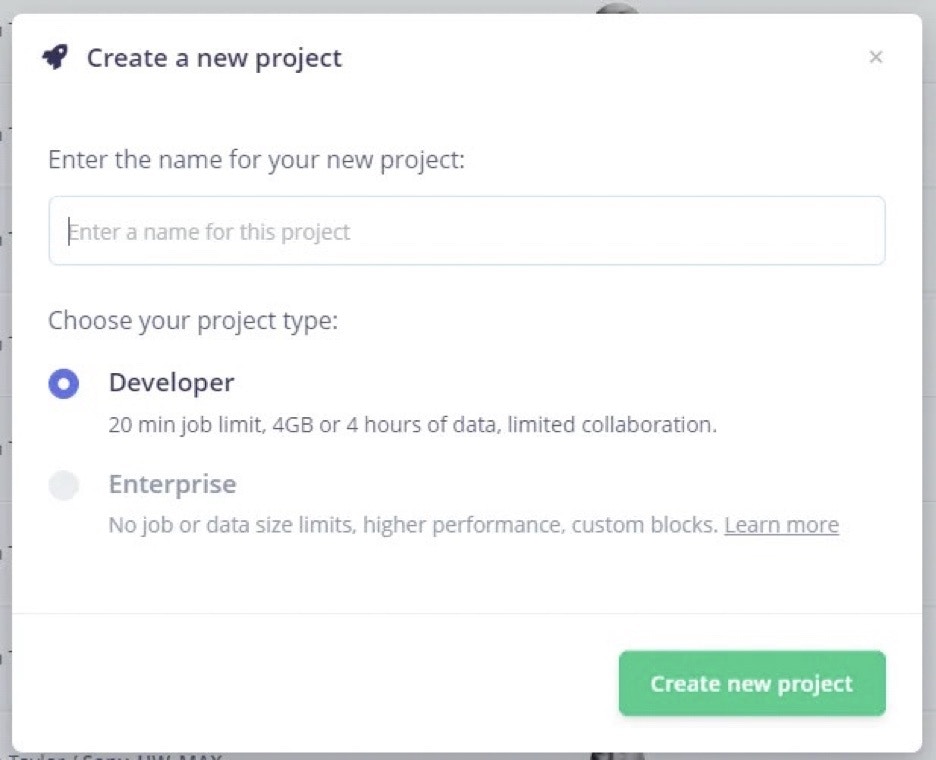
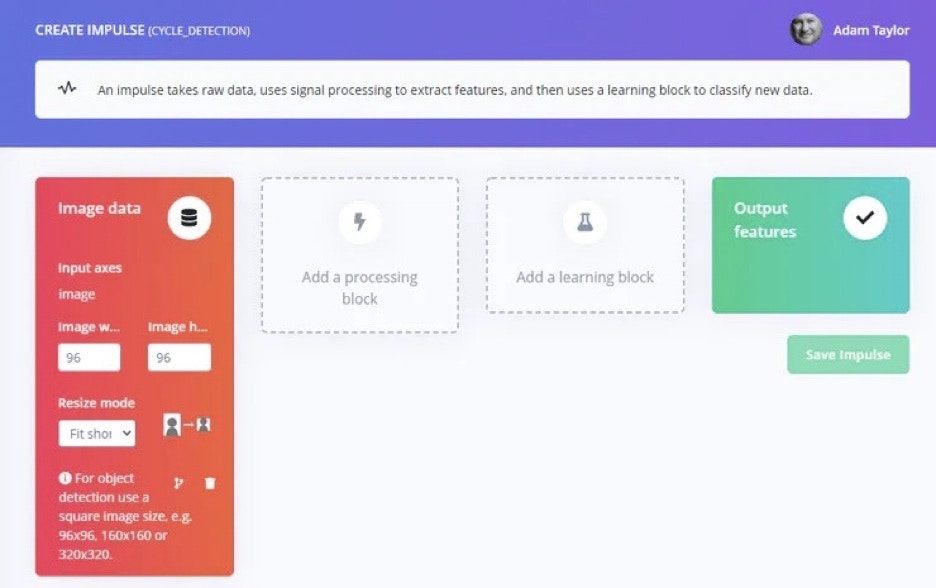
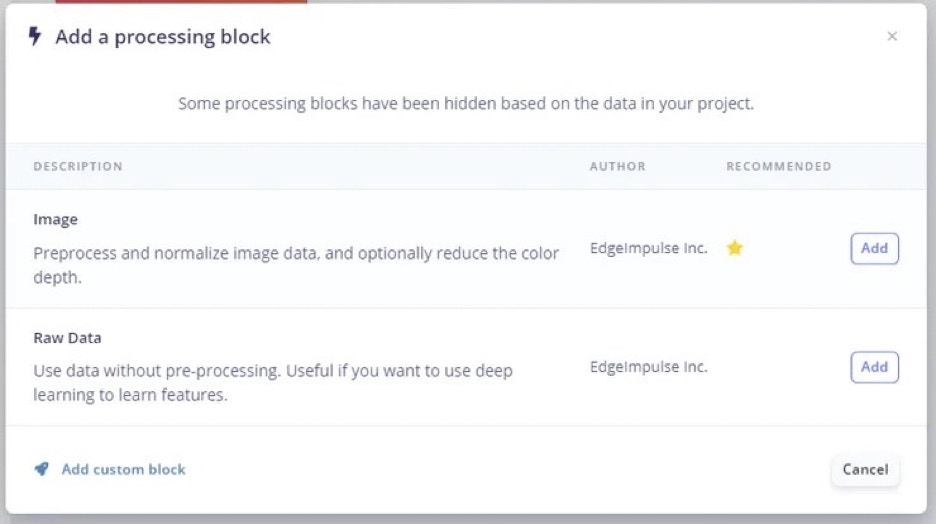
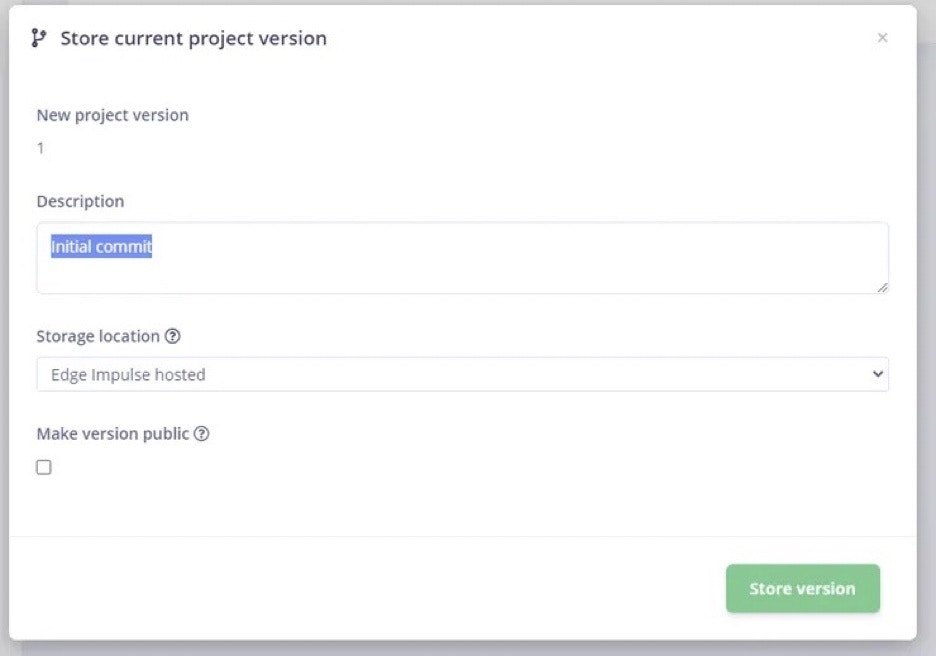
The first thing do is log into your Edge Impulse account and create a new project.