Project Demo
GitHub Repo
https://github.com/jlutzwpi/Arduin-Row/tree/mainStory
The sport of rowing, even on a rowing machine, is a technical one. Most people can hop on a rowing machine and start rowing, but may not be generating the most power possible. Many think that rowing involves pulling the handle with your hands, arms, and back, but in order to generate the most power you actually have to push with your legs. That is where you can generate the fastest times on the rowing machine.
Proper form involves pushing with your legs before pulling with your arms.
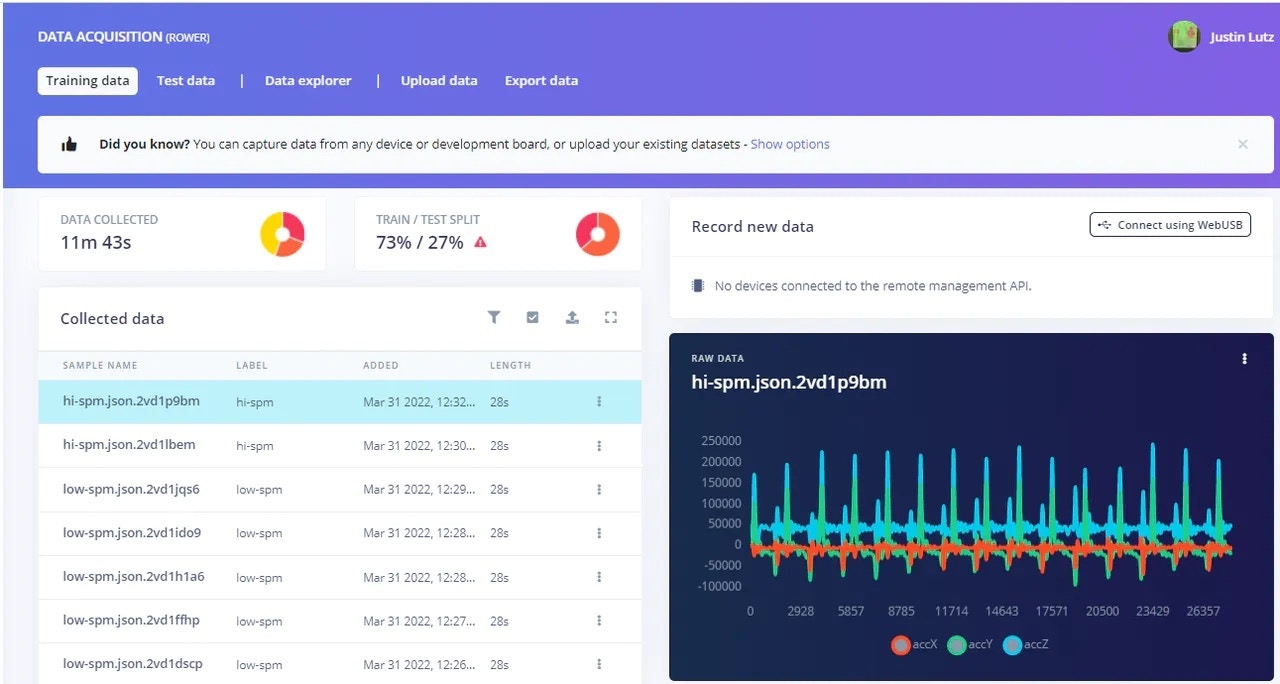
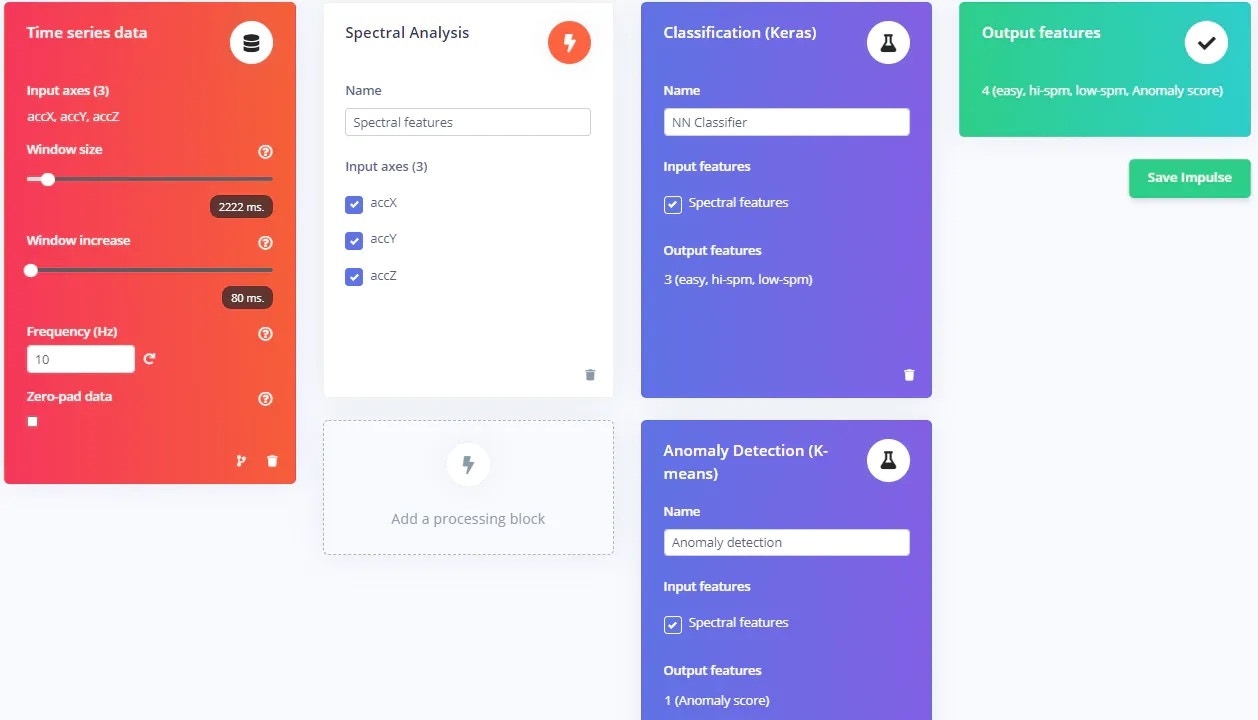
Data collection

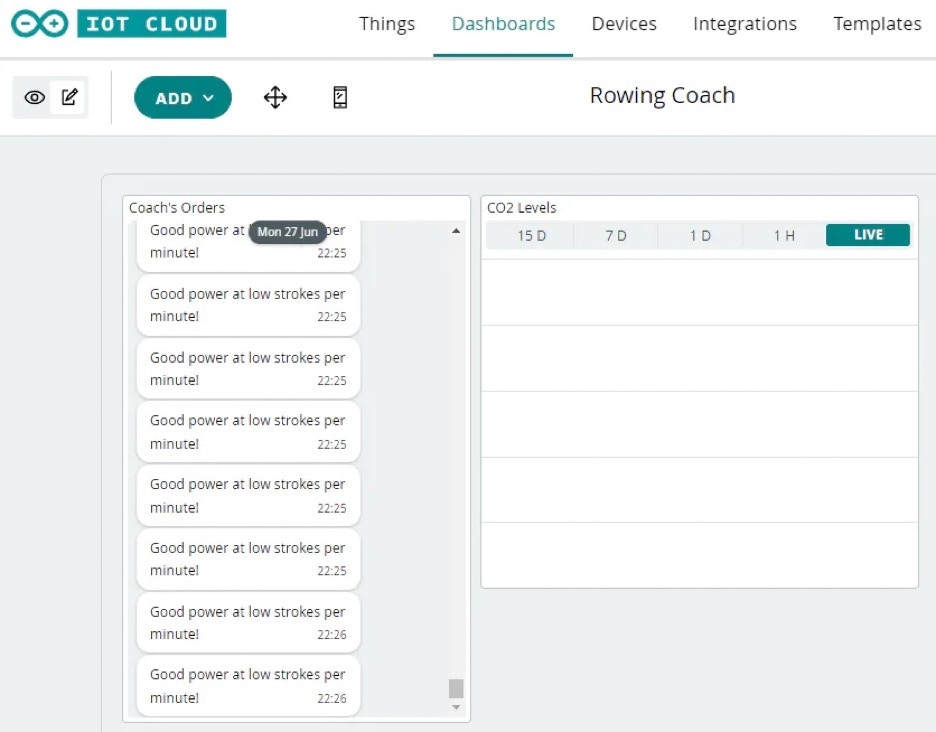
The IOT Cloud Dashboard is easy to use and makes it easy to visualize your data.
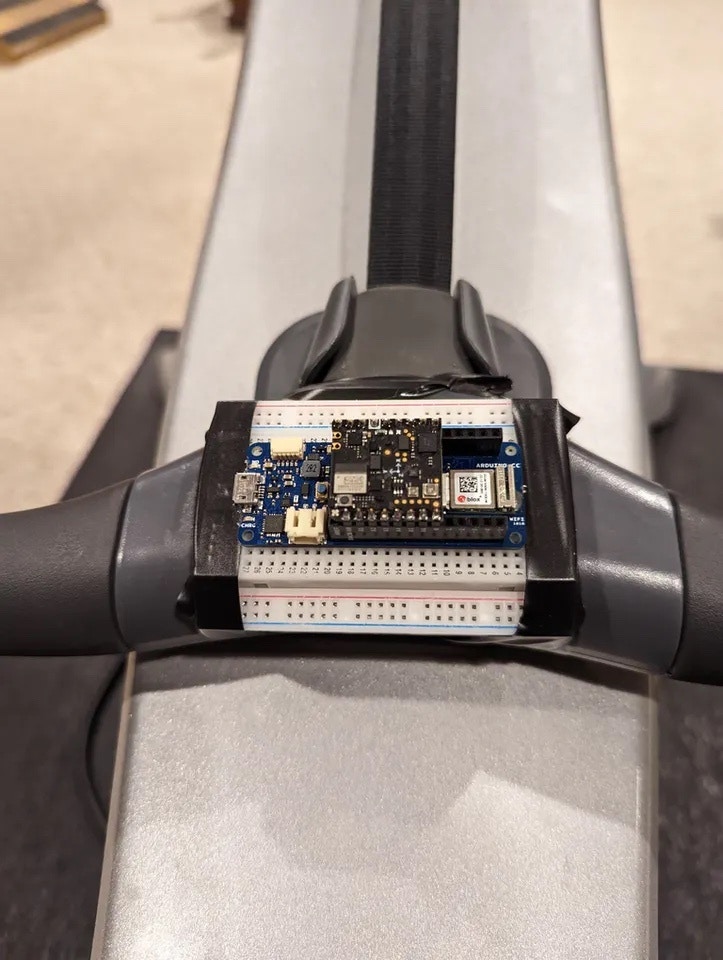
Nicla Sense ME as a shield on the Arduino MKR Wifi 1010 on a breadboard taped to the rowing handle
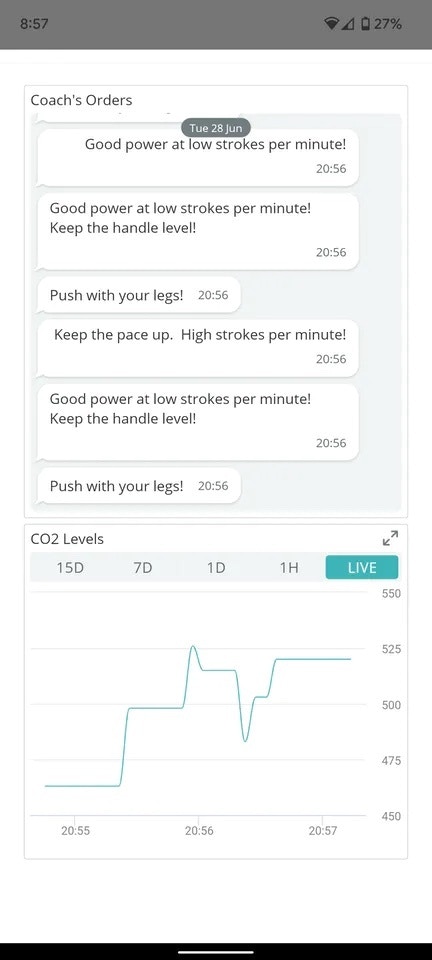
Output of the rowing inference to the Arduino IOT Remote app