Introduction
Illegal logging is a major environmental issue worldwide. It has been estimated that it accounts for up to 30% of the global timber trade, and is responsible for the loss of billions of dollars worth of valuable timber each year. When timber is exploited illegally, governments lose much-needed money, particularly in developing countries. In addition to this, illegal logging severely impacts biodiversity and it can lead to soil erosion, decreased water quality, and habitat loss for wildlife. Furthermore, illegal logging is frequently associated with organized crime groups and can serve as a source of funding for rebel or terrorist groups. Due to the vastness of forested regions, it is difficult to identify unauthorised logging activities, which frequently occur in isolated and difficult-to-reach locations and traditional approaches, such as ground patrols, are frequently ineffective. One way to combat this problem is through the use of AI algorithms that can be deployed on battery-powered devices, such as sensors near the forest on roads frequented by the trucks transporting the wood. Machine learning algorithms are well suited for this task as they can be trained to recognize the characteristic sounds made by logging trucks. When deployed on the roads near forests, these sensors can provide a real-time alert when a logging activity is detected, allowing law enforcement to quickly respond.The Challenge
One challenge posed by this approach is that sensors must be able to distinguish between different types of logging truck noises and the background noise in the forest. Another challenge is that the devices must be ruggedized to withstand the harsh environment of the forest. We will address both of these challenges by using the Nordic Thingy:53, a multi-sensor prototyping platform for wireless IoT and embedded machine learning, which will be used to train a ML algorithm, and is encased in a tough polymer casing that can withstand drops and impact.Our Solution


Hardware requirements
- Nordic Thingy:53
- USB-C cable
Software requirements
- Edge Impulse account
- Edge Impulse CLI
- Nordic nRF Edge Impulse App
Hardware Setup
Our choice of Edge computing hardware for this use case is the Nordic Thingy:53, is based on Nordic Semiconductor’s flagship dual-core wireless SoC, the nRF5340. The SoC’s Arm Cortex-M33 CPU application core assures that the Thingy:53 can handle heavy computational workloads of embedded machine learning without interfering with the wireless communication. The application core is clocked at 128 MHz for maximum speed, with 1 MB of flash storage and 512 KB RAM to fit your programs. Wireless communication is handled independently by another Arm Cortex-M33 core clocked at 64 MHz for more power efficient operation and without using any computing resources from the application core. The Bluetooth Low Energy (LE) radio provides firmware updates and communication through Bluetooth LE, as well as additional protocols such as Bluetooth mesh, Thread, Zigbee, and proprietary 2.4 GHz protocols.

Software Setup
Creating an Edge Impulse Project
Let’s start by creating an Edge Impulse project. Select Developer as your project type, click Create a new project, and give it a suggestive name.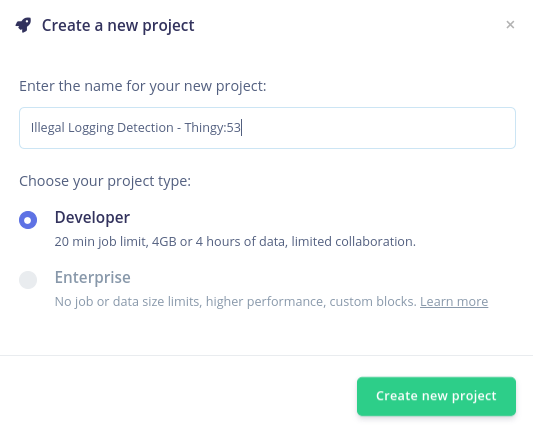
Connecting the Device
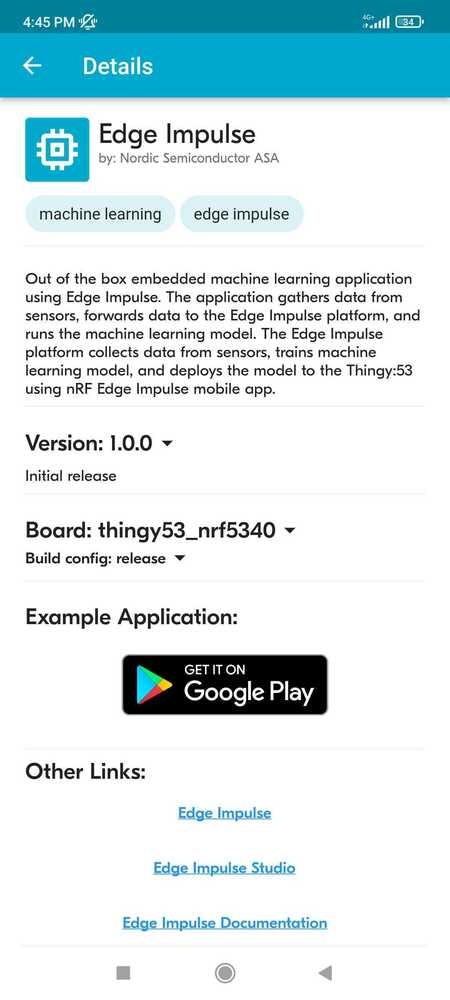
New Thingy:53 devices will function with the Nordic nRF Edge Impulse iPhone and Android apps, as well as with the Edge Impulse Studio right out of the box. Before connecting it to the Edge Impulse project, the firmware of the Thingy:53 must be updated. Download the nRF Programmer mobile application and launch it. You will be prompted with a number of available samples.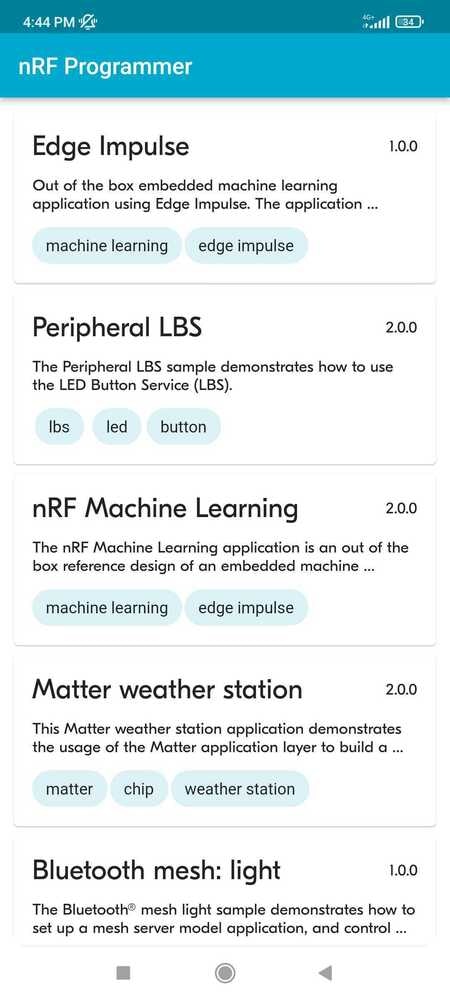

Building the Dataset
We will use a publicly available truck noise dataset and a forest sound dataset, as well as the Edge Impulse platform to train and deploy a model that can distinguish between the two types of sounds. In order to upload the sound dataset to Edge Impulse, we’ll have to split it into smaller samples (in our case the samples are 3 seconds long), and you can do so using the following command line instruction: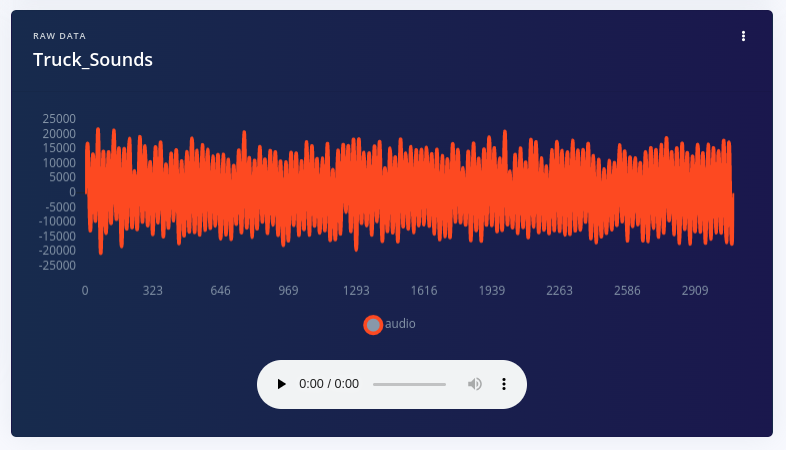
Designing the Impulse
Now that the data is available, it’s time to create the Impulse. The functional Block of the Edge Impulse ecosystem is called “Impulse” and it fundamentally describes a collection of blocks through which data flows, starting from the ingestion phase and up to outputting the features.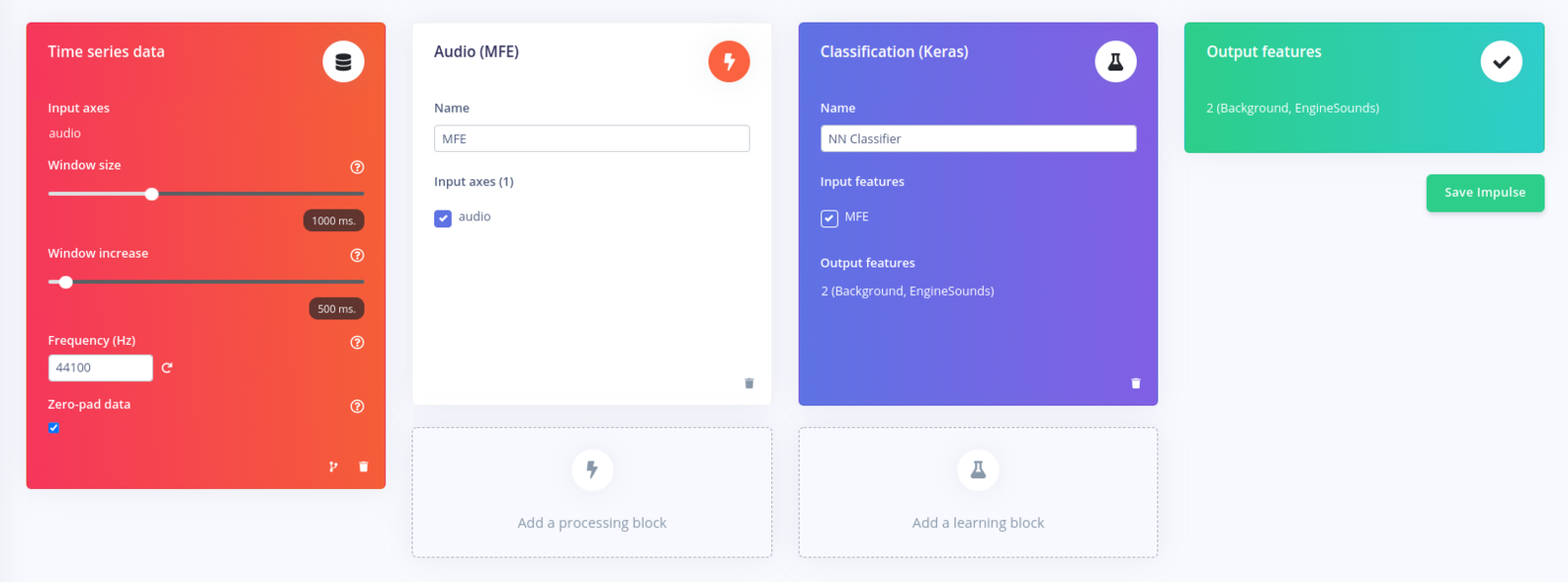
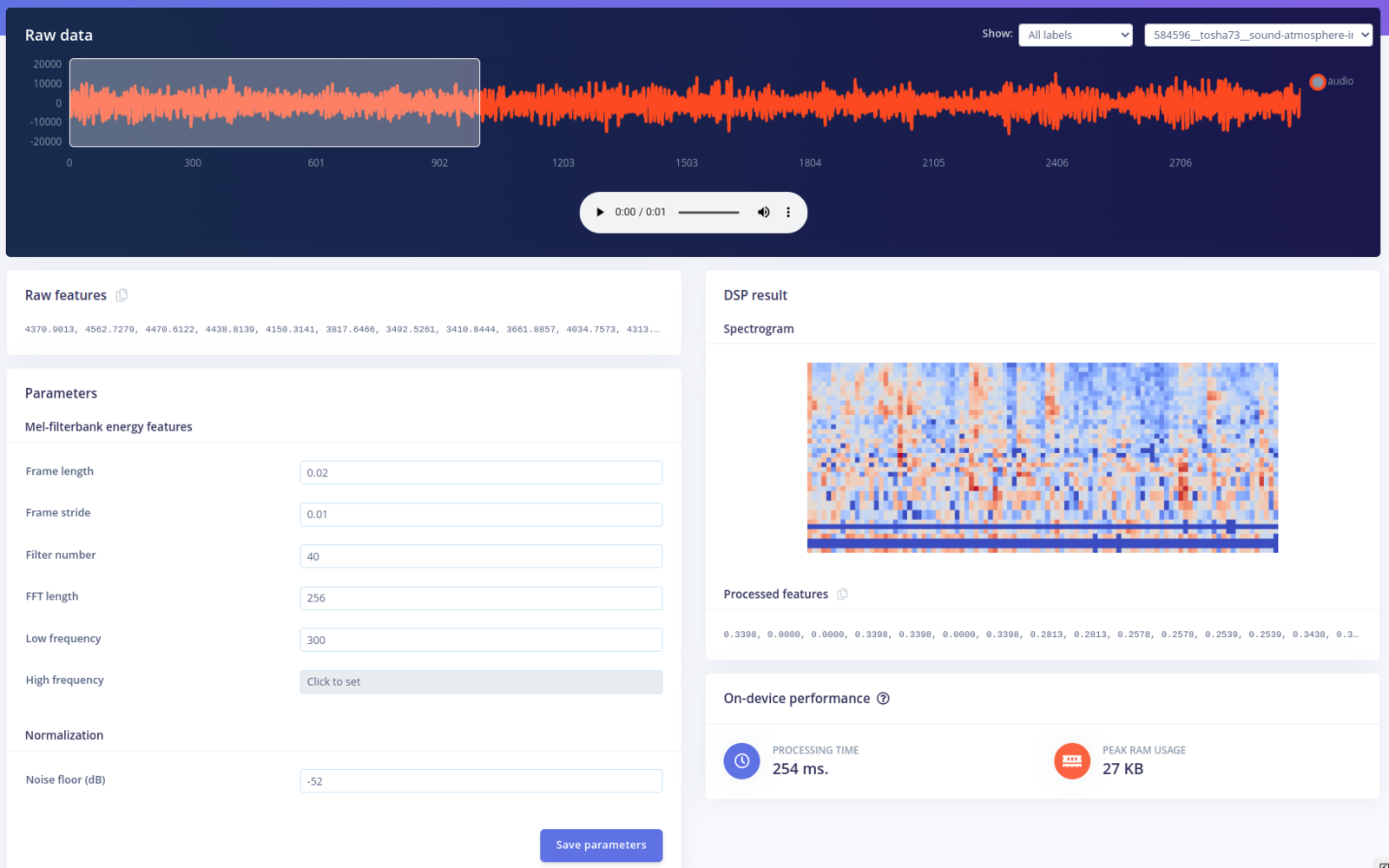
Configuring the Audio Features Block
The Audio MFE (Mel-filterbank energy) processing block extracts signal time and frequency information. A mel filter bank can be used to break down an audio signal into discrete frequency bands on the mel frequency scale, simulating the nonlinear human perception of sound. It works effectively with audio data, primarily for non-voice recognition applications when the sounds to be categorised may be recognized by the human ear. You can read more about how this block works here. A spectrogram is a display of the MFE’s output for a sample of audio on the right side of the page. The MFE block converts an audio window into a data table, with each row representing a frequency range and each column representing a time period. The value contained within each cell reflects the amplitude of its related frequency range during that time period. The spectrogram depicts each cell as a colored block, with the intensity varying according to the amplitude. A spectrogram’s patterns reveal information about the sort of sound it represents. In our case, the spectrogram below depicts a pattern characteristic of forest background noise: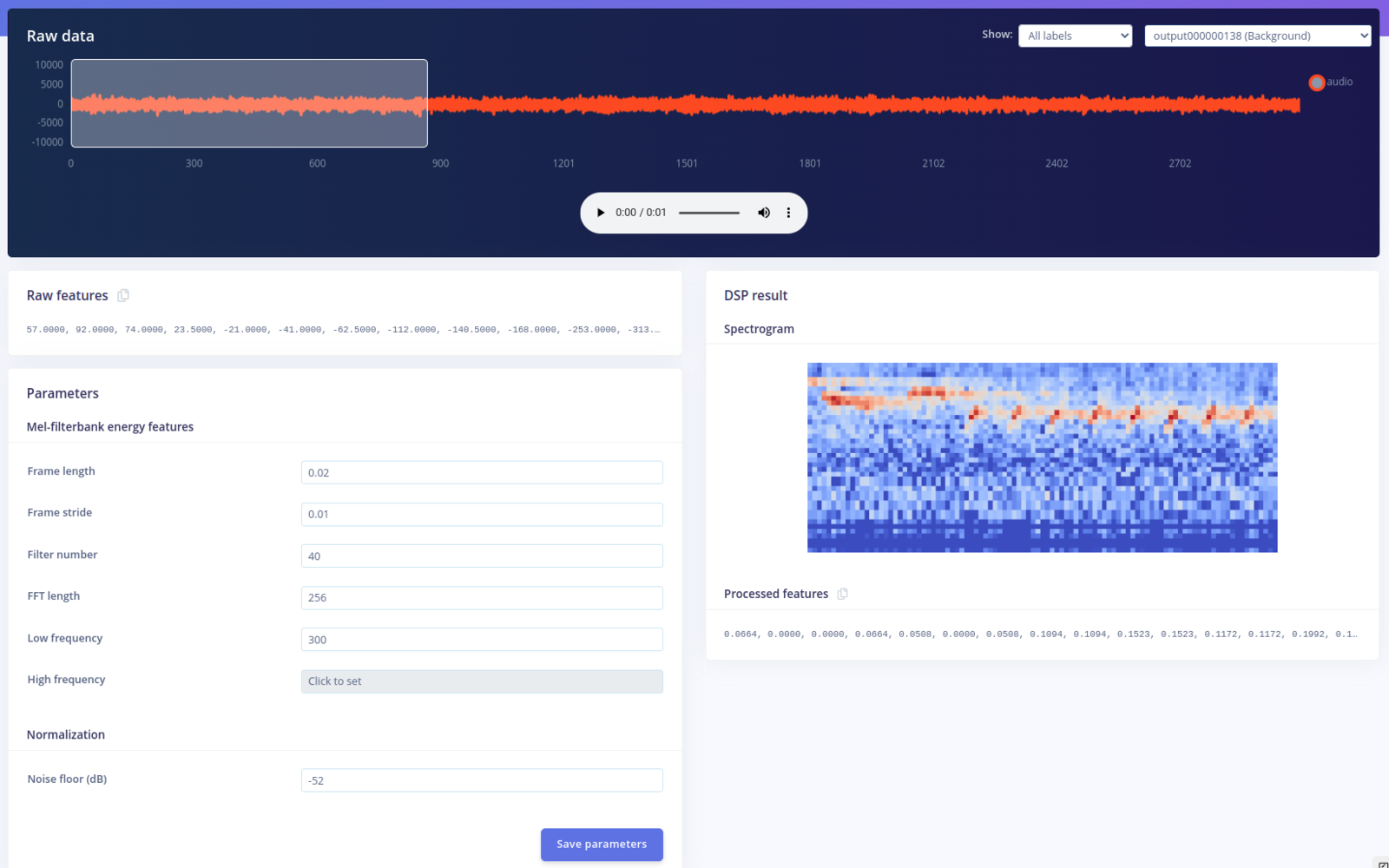
Configure the Neural Network
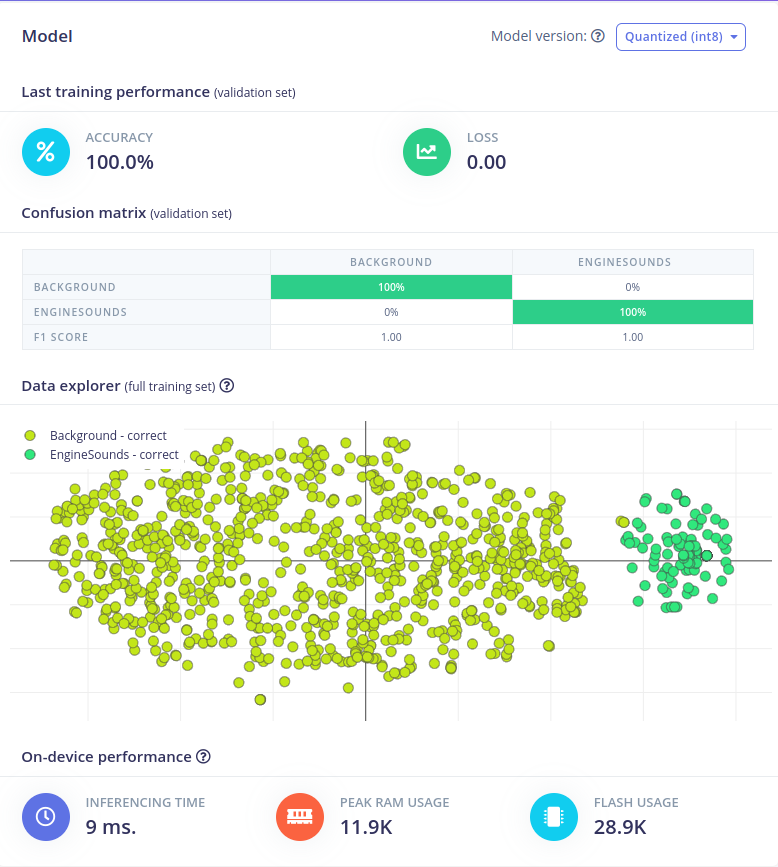
The next step in developing our machine learning algorithm is configuring the NN classifier block. There are various parameters that can be changed: the Number of training cycles, the Learning rate, the Validation set size and to enable the Auto-balance dataset function. They allow you to control the number of epochs to train the NN on, how fast it learns and the percent of samples from the training dataset used for validation. Underneath, the architecture of the NN is described. For the moment, leave everything as is and press Start training.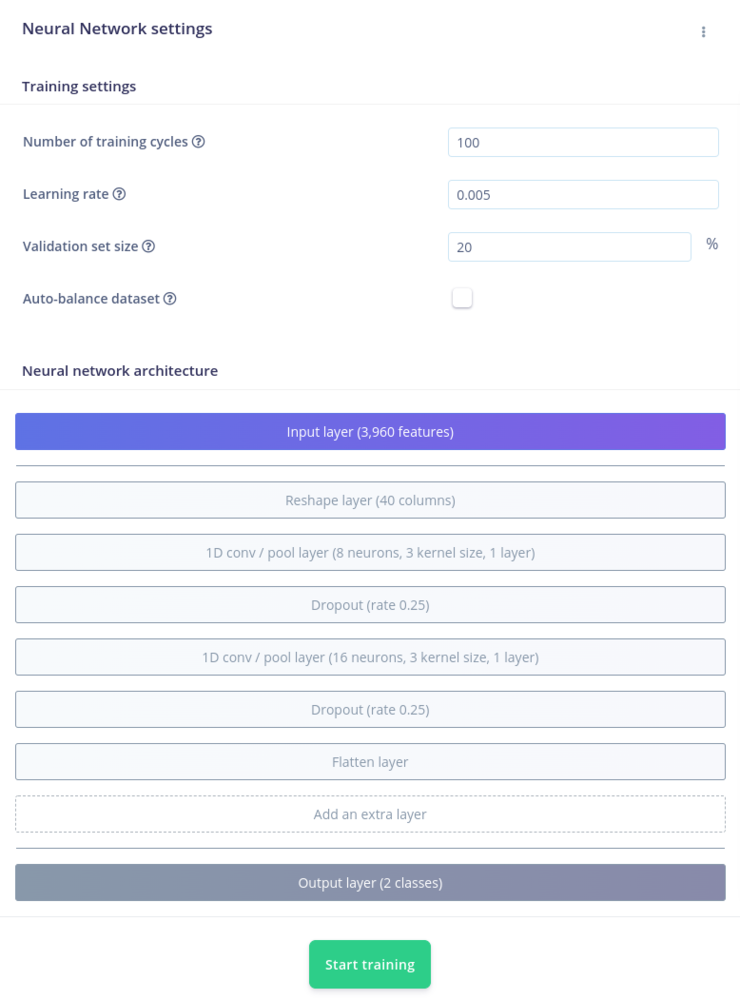
Model Testing and NN Optimization
To quickly test the performance of your NN, navigate to the Model testing tab, and click on Classify all. This will evaluate how well the model will perform on never seen data. This is a great practice to avoid overfitting the model on the training data.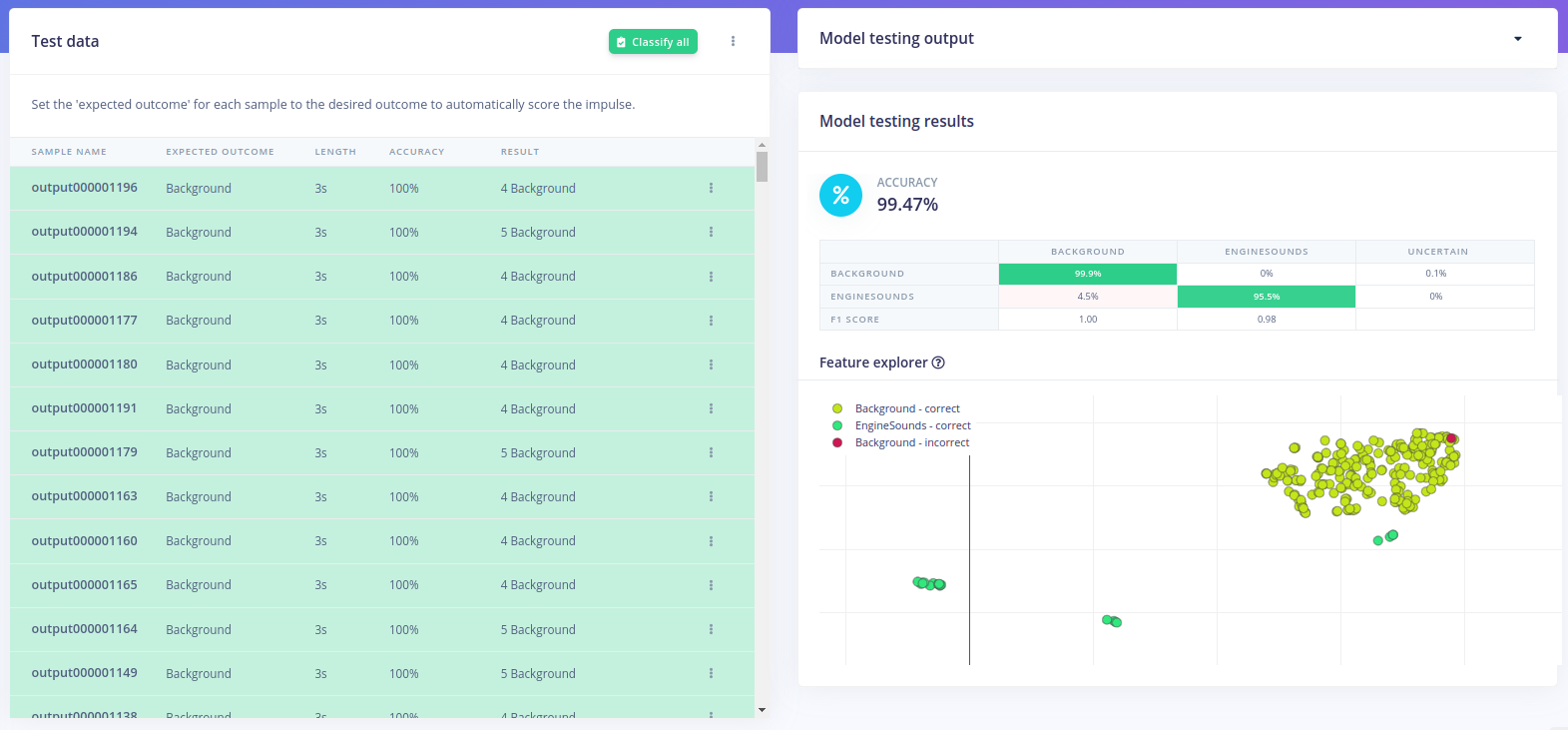
Upload the Impulse via USB Cable
You will notice that another menu pops up that allows you to opt in if you want to enable EON Compiler. For now, click Build and wait for the process to end. Once it’s done, download the .hex file and follow the steps in the video that shows up to upload it on the Thingy:53 board. With the impulse uploaded, connect the board to your computer, launch a terminal and issue the following command to see the results of the inferencing:Upload the Impulse via Android/IoS App
Another way of deploying the model on the edge is using the Nordic nRF Edge Impulse App for iPhone or Android:- Download and install the app for your Android/IoS device.
- Launch it and log in with your edgeimpulse.com credentials.
- Select your Illegal Logging Detection project from the list



Future Development
The Nordic Thingy:53 is equipped with a Dual-core Bluetooth 5.3 SoC supporting Bluetooth Low Energy, Bluetooth mesh, NFC, Thread and Zigbee, which makes it a great choice for creating edge applications that use bluetooth communication as an output. In this case, Edge Impulse platform allows its users to deploy their Impulse as a library containing all the signal processing blocks, learning blocks, configurations, and SDK required to integrate the ML model in your own unique application.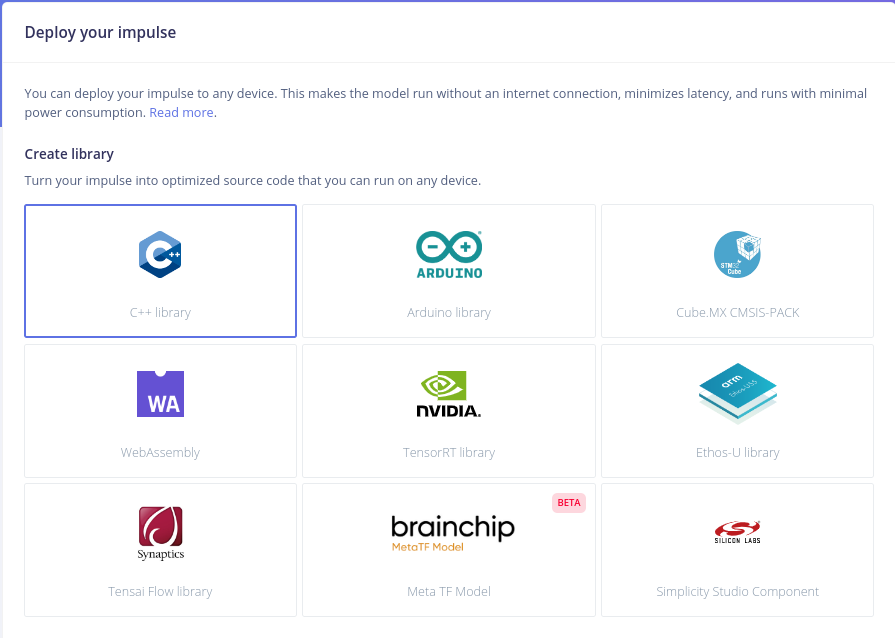
Conclusion
