In the influential cyberpunk novel Neuromancer (1984), William Gibson saw a future where digital intelligence and remote control would define how power and information moved through society. Among the technologies he anticipated were small flying machines capable of observation, tracking, and coercion—concepts that closely resemble modern drones.
Four decades later, affordable unmanned aerial vehicles (UAVs) have become a reality, bringing both useful applications and new security challenges. The widespread adoption of consumer drones, driven by lower costs and increasingly sophisticated capabilities, has created new forms of misuse that require affordable and intelligent detection systems. Potential scenarios include surveillance prior to robberies, privacy invasion, unauthorized operation in restricted areas, violations of no-fly zones, and reconnaissance activities.
This project proposes a portable AI-based drone detection system that combines multiple sensing layers: audio analysis, computer vision, and, in the future, radio-frequency analysis.
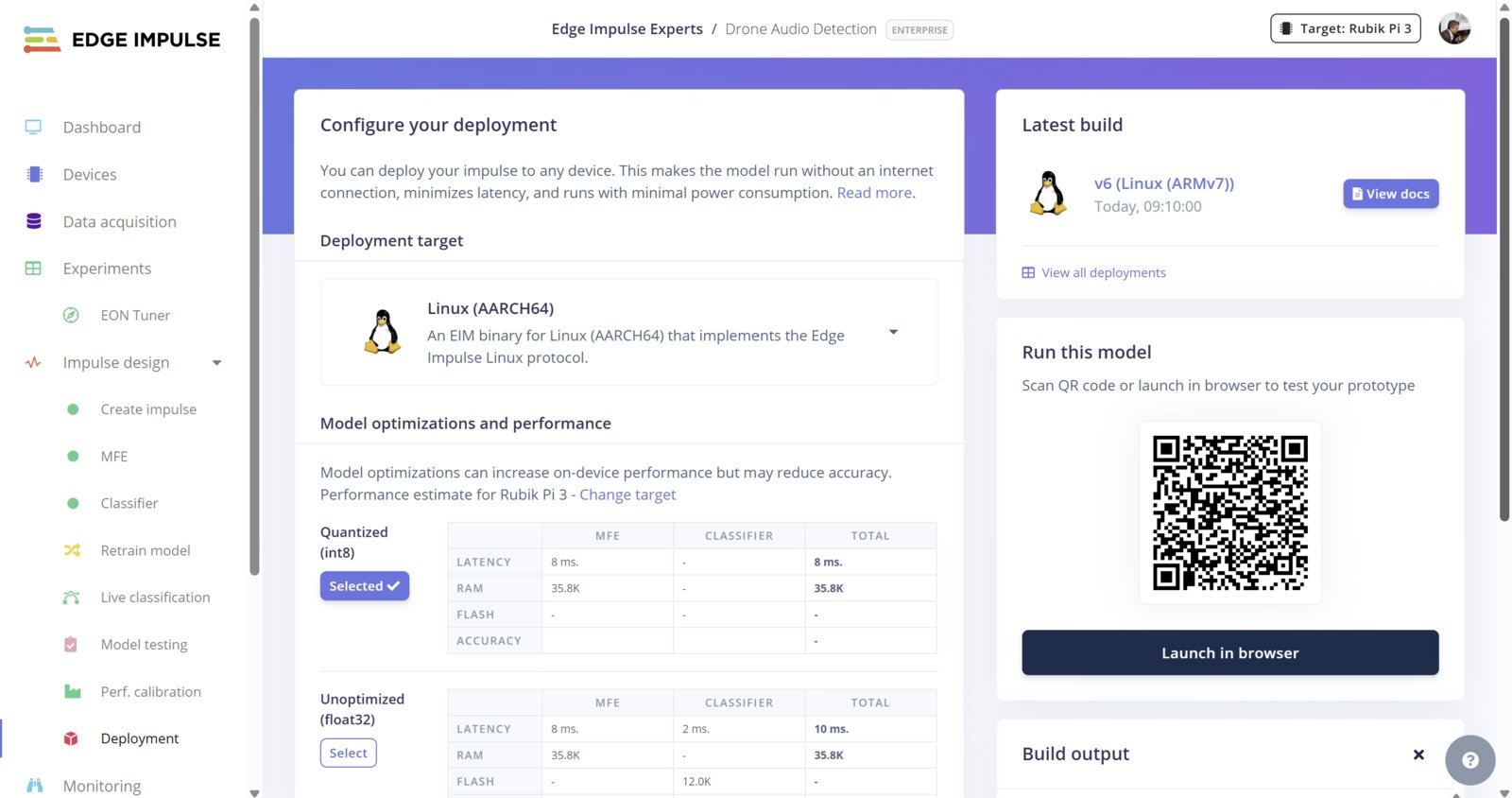
The first layer uses Edge Impulse to train an embedded audio classification model capable of recognizing the characteristic acoustic signature of drone motors. The trained model runs locally on a Rubik Pi 3 connected to a microphone and a camera.
When the audio model detects a potential drone with sufficient confidence, the system invokes a local instance of OpenClaw, combining the audio confidence score with an image captured by the camera.
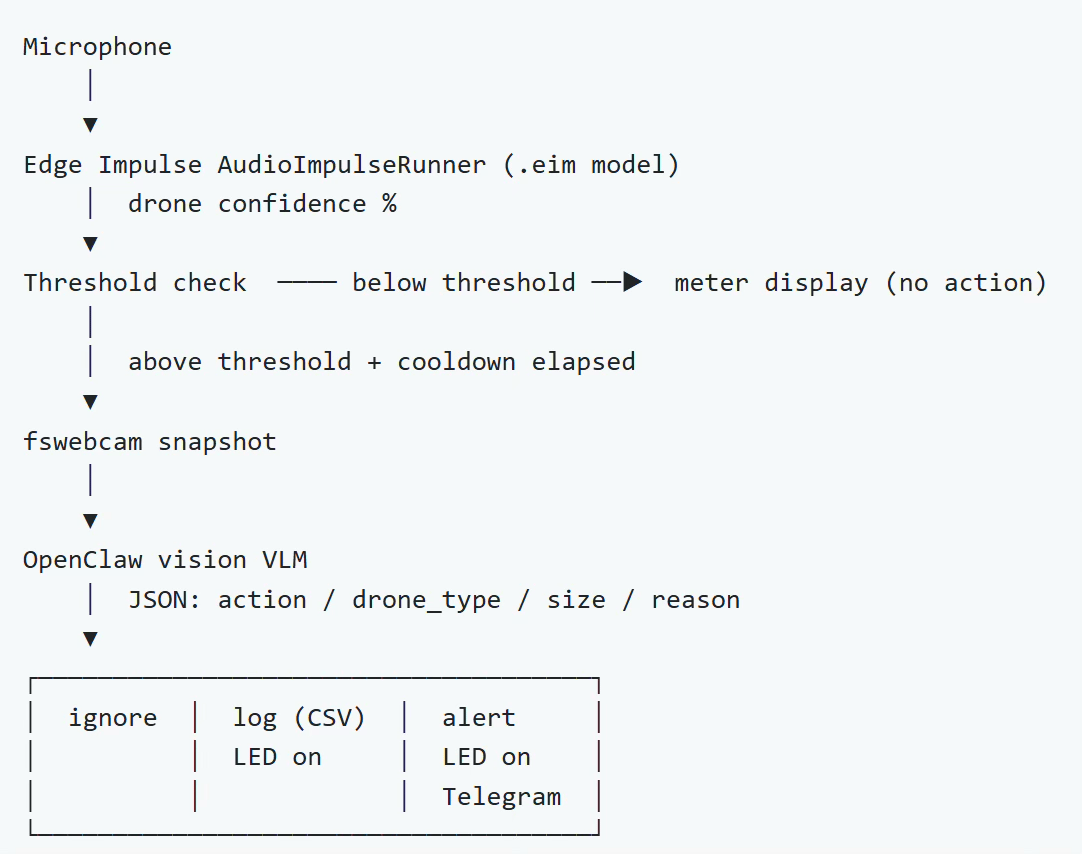
- Ignoring false positives
- Logging drone detection and evidence
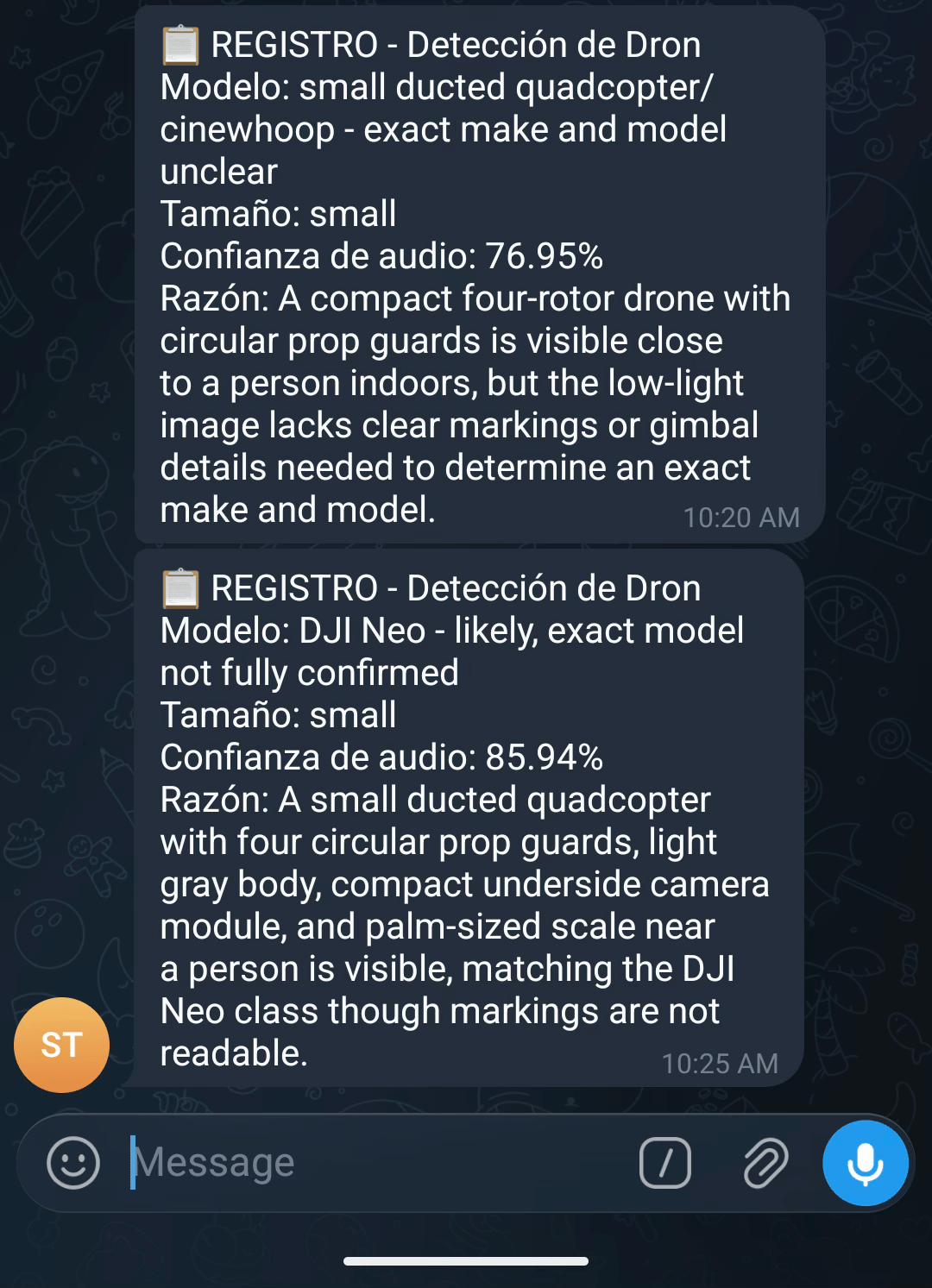
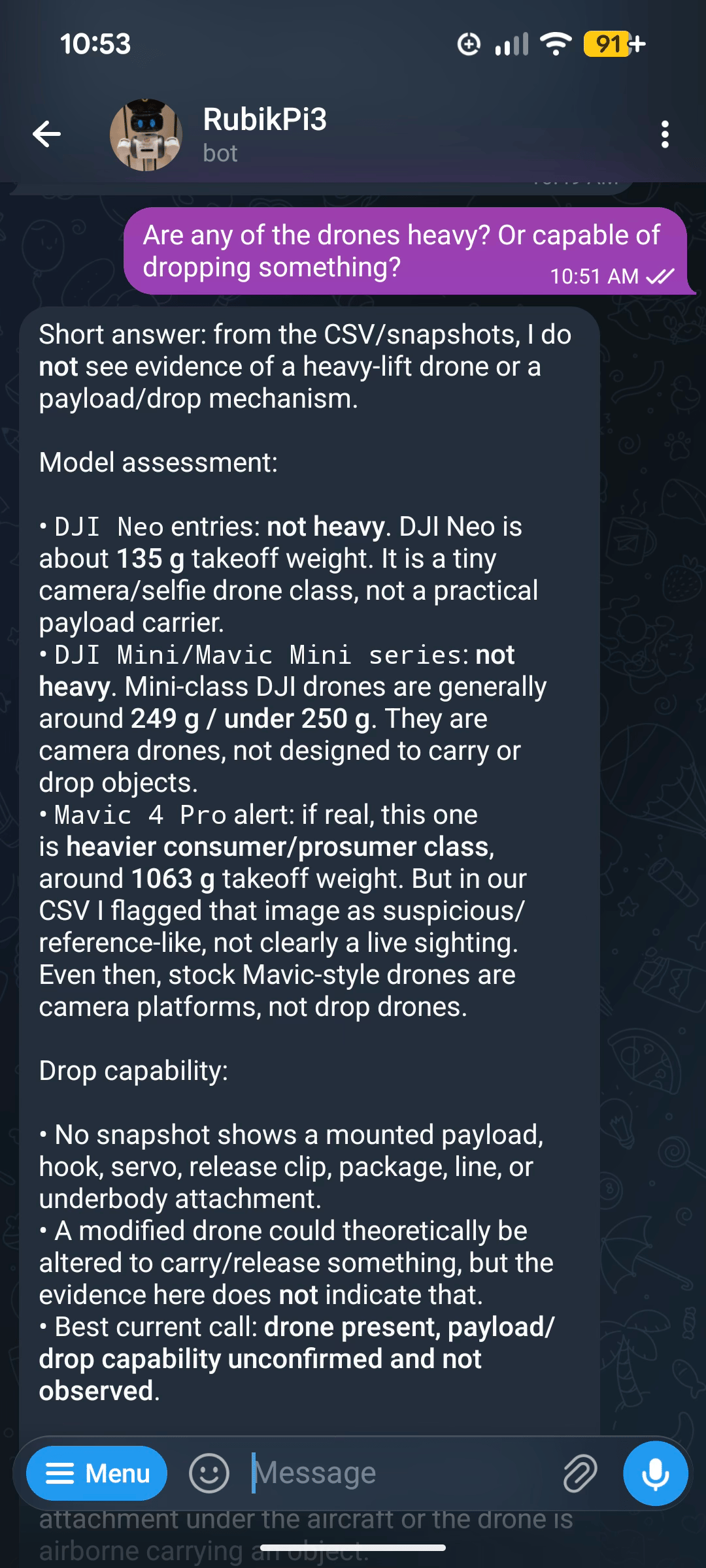
- Sending notifications
- Activating relays, alarms, or other external systems

Hardware
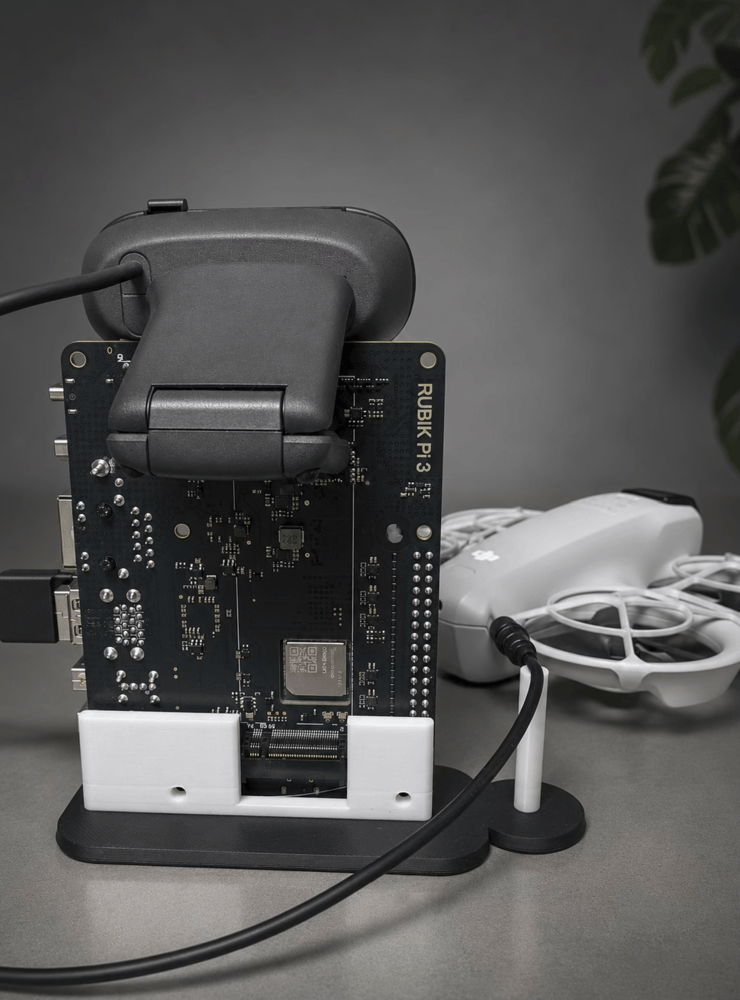
This project was built around the Rubik Pi 3. The Rubik Pi 3 is a powerful, lightweight development board based on the Qualcomm Dragonwing™ QCS6490 platform. It is notable for being one of the first Raspberry Pi-style boards designed around a Qualcomm AI platform, bringing high-performance edge AI capabilities to a developer-friendly form factor.Key Specifications
- Platform: Qualcomm Dragonwing QCS6490
- Dimensions: 100 mm × 75 mm
- AI Performance: Up to 12 TOPS via the integrated Hexagon NPU
- GPU: Adreno 643
- RAM: 8 GB LPDDR4x
- Storage: 128 GB UFS 2.2
Complete Parts List
- Thundercomm Rubik Pi 3
- Active cooler
- USB-C Power Delivery supply (12 V, 3 A)
- USB microphone (or a USB sound console with a MIC)
- USB webcam
- Ethernet cable
- Optional 3D-printed stand
Audio Model Training with Edge Impulse
Although I could have recorded sounds from different drone models and built a custom dataset, the machine learning community has produced several publicly available datasets that significantly accelerate development. For this project, I used a drone audio dataset shared by the community. The dataset contains recordings labeled as drone and non-drone sounds, providing a solid foundation for supervised classification. I also added additional samples for both the drone and unknown classes.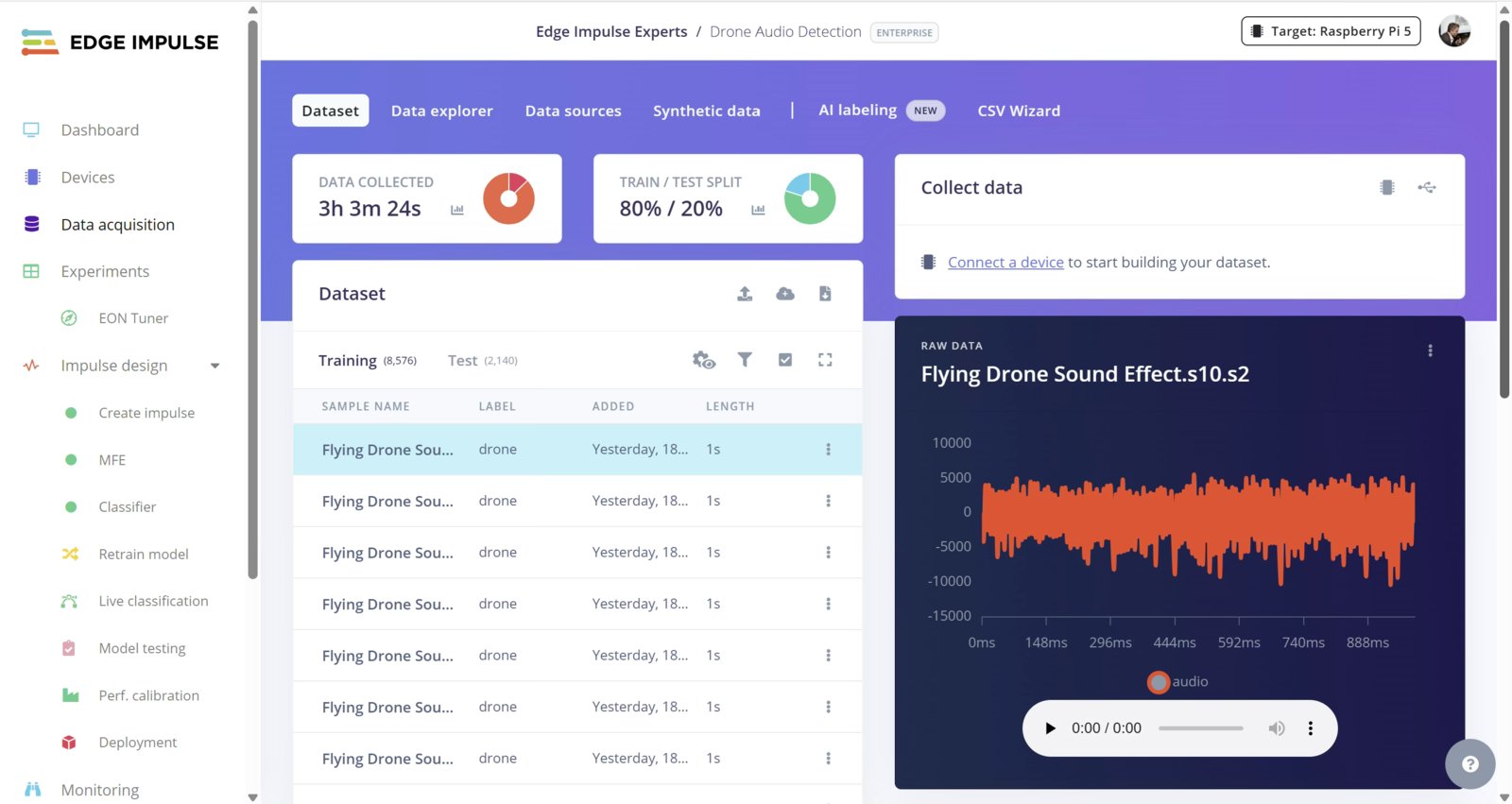
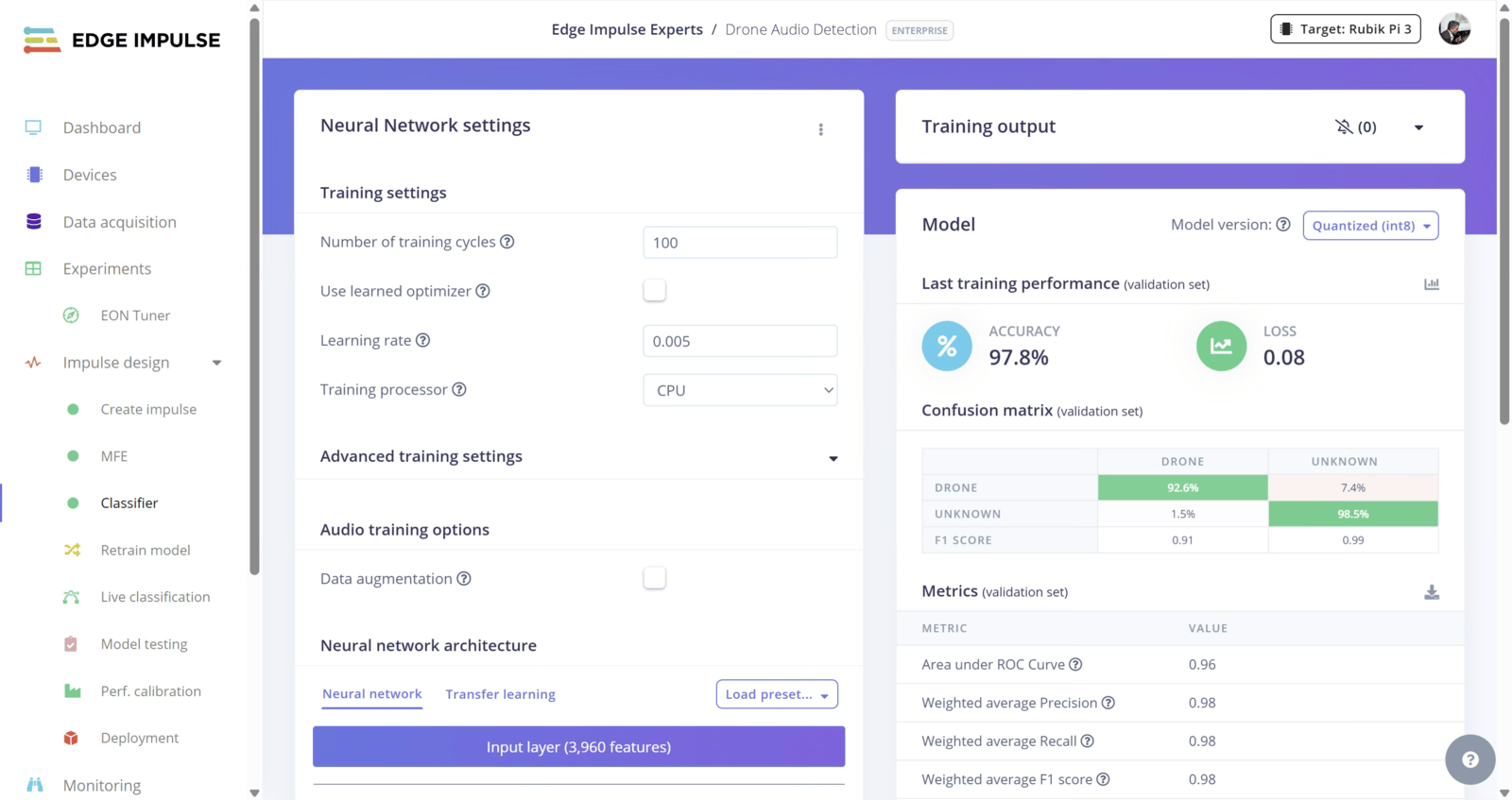
- Training/testing split: 80% / 20%
- Input type: Time Series Data
- Feature extraction: MFE (Mel-Frequency Energy)
- Learning block: Classification
Rubik Pi 3 Setup
Camera Setup
To verify that the webcam was correctly detected, I executed:Microphone Setup
To adjust microphone gain and input levels, I used:OpenClaw Installation
I installed OpenClaw using:Code Settings
The following settings can be adjusted in drone.py before placing the file into the Rubik Pi.How to get a Telegram token
Open Telegram and search for @BotFather (ensure it has the blue verified checkmark). Start a chat and send the command: /newbot. Follow instructions to give your bot a name. Create a username for the bot ending in “bot” (e.g., MyTest_bot). Copy the API Token provided in the message “Use this token to access the HTTP API..”3d printed case
I have designed a simple stand for the board and the mic. Download from https://cults3d.com/en/3d-model/gadget/ai-drone-detection-with-rubik-pi-3 and print with PLA, no support.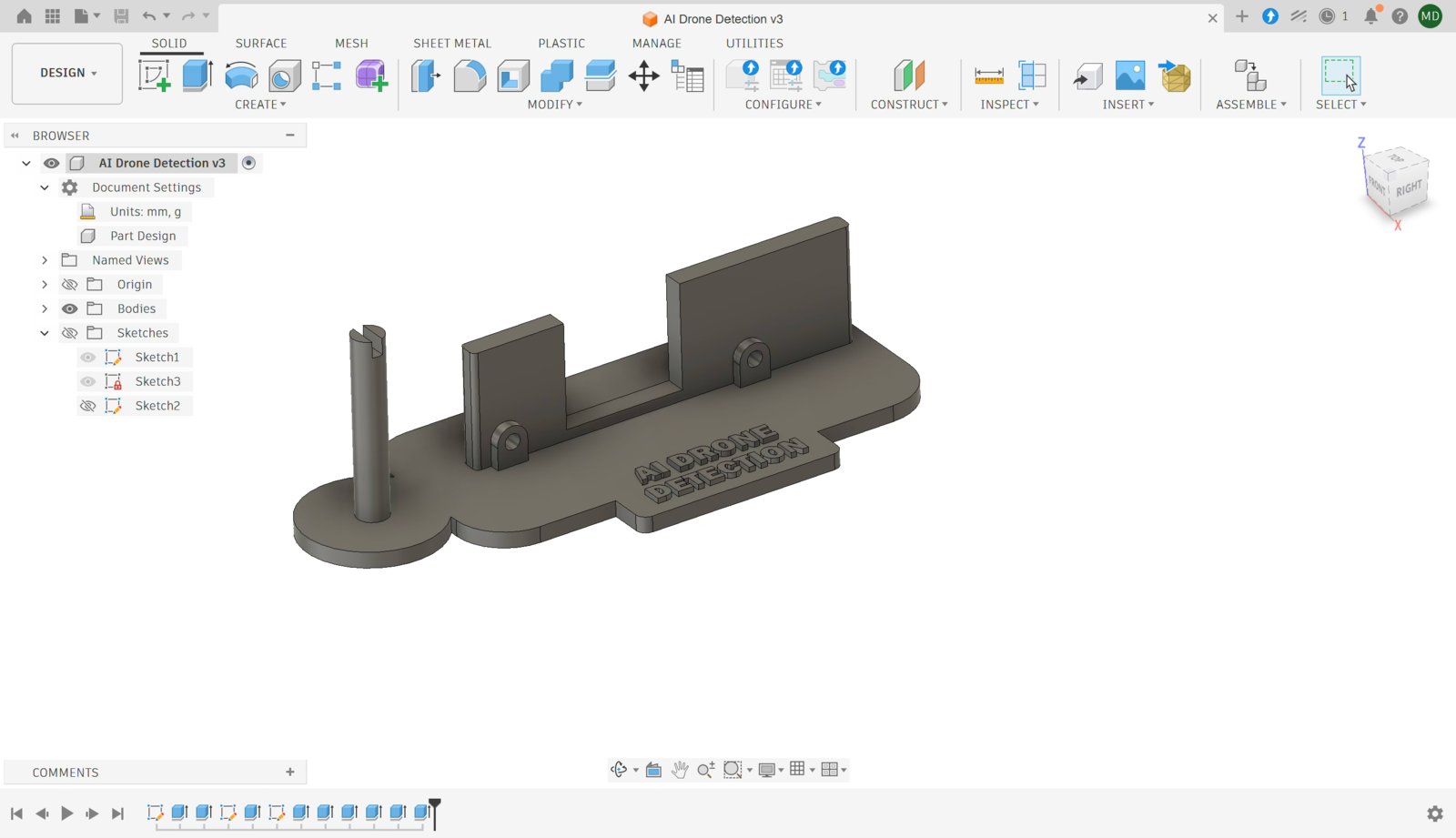
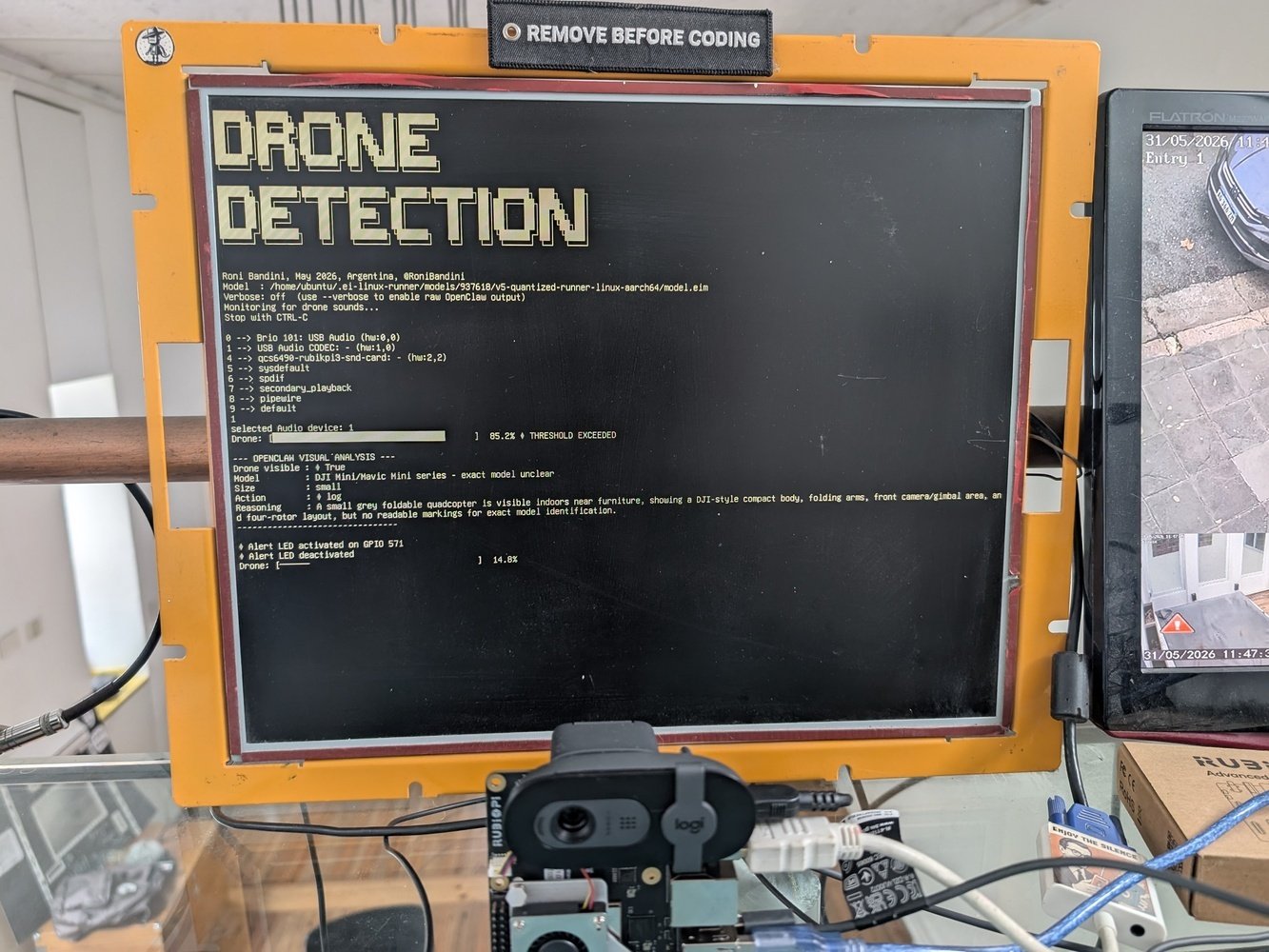
Operation
I copied the drone.py script and the model.eim to Rubik Pi 3 and I started the system with: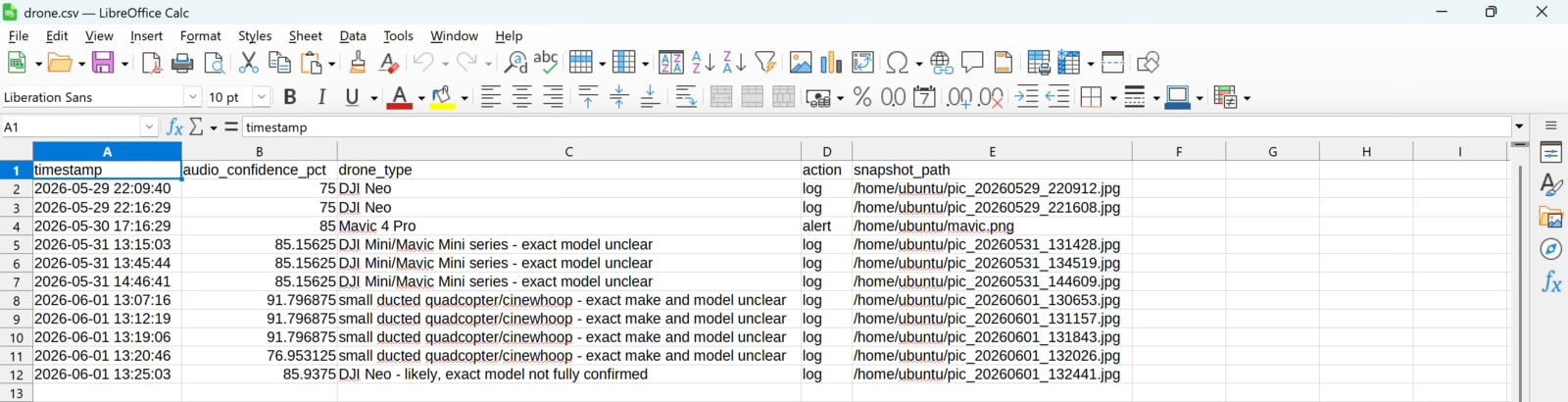
- Ignore
- Log
- Alert
OpenClaw capabilities
Radio Frequency Analysis
Audio and visual detection methods have inherent range limitations. A drone may be too far away to be heard or seen clearly. A third sensing layer can extend detection range considerably: radio-frequency (RF) analysis. Most consumer drones continuously exchange telemetry, control, and video data over radio links, typically in the 2.4 GHz and 5.8 GHz bands. Monitoring these frequencies can reveal drone activity long before the aircraft becomes visible or audible. Unlike audio and vision analysis, RF detection requires specialized hardware. Devices such as the TinySA Ultra+ can capture and analyze radio spectrum activity in real time. Traditional RF drone detection systems often rely on heuristics and manually crafted rules. While useful, these approaches frequently struggle with noisy environments and changing signal conditions. Machine learning provides a more robust alternative. The process is conceptually similar to audio classification:- Divide the target frequency range into segments.
- Record signal power levels across those segments.
- Label the captured samples.
- Train a classification model.
- Deploy the model for real-time inference.