> ## Documentation Index
> Fetch the complete documentation index at: https://docs.edgeimpulse.com/llms.txt
> Use this file to discover all available pages before exploring further.
# Camera inference on Android
> Run real-time image classification and object detection on Android using a live camera feed
This tutorial shows how to run Edge Impulse computer vision models on a live Android camera feed. Frames are captured using CameraX, converted to the format your model expects, and passed to the Edge Impulse C++ classifier via JNI. Results (classification labels, bounding boxes, or anomaly regions) are drawn back over the camera preview in real time.
The app supports image classification, object detection with bounding boxes, and visual anomaly detection. You switch between them by deploying a different model; the inference code structure is the same.
 If you haven't been through the [Static buffer inference](./static-buffer-inference) example yet, start there. It covers the JNI bridge and inference loop without the added complexity of a camera pipeline.
## What you'll build
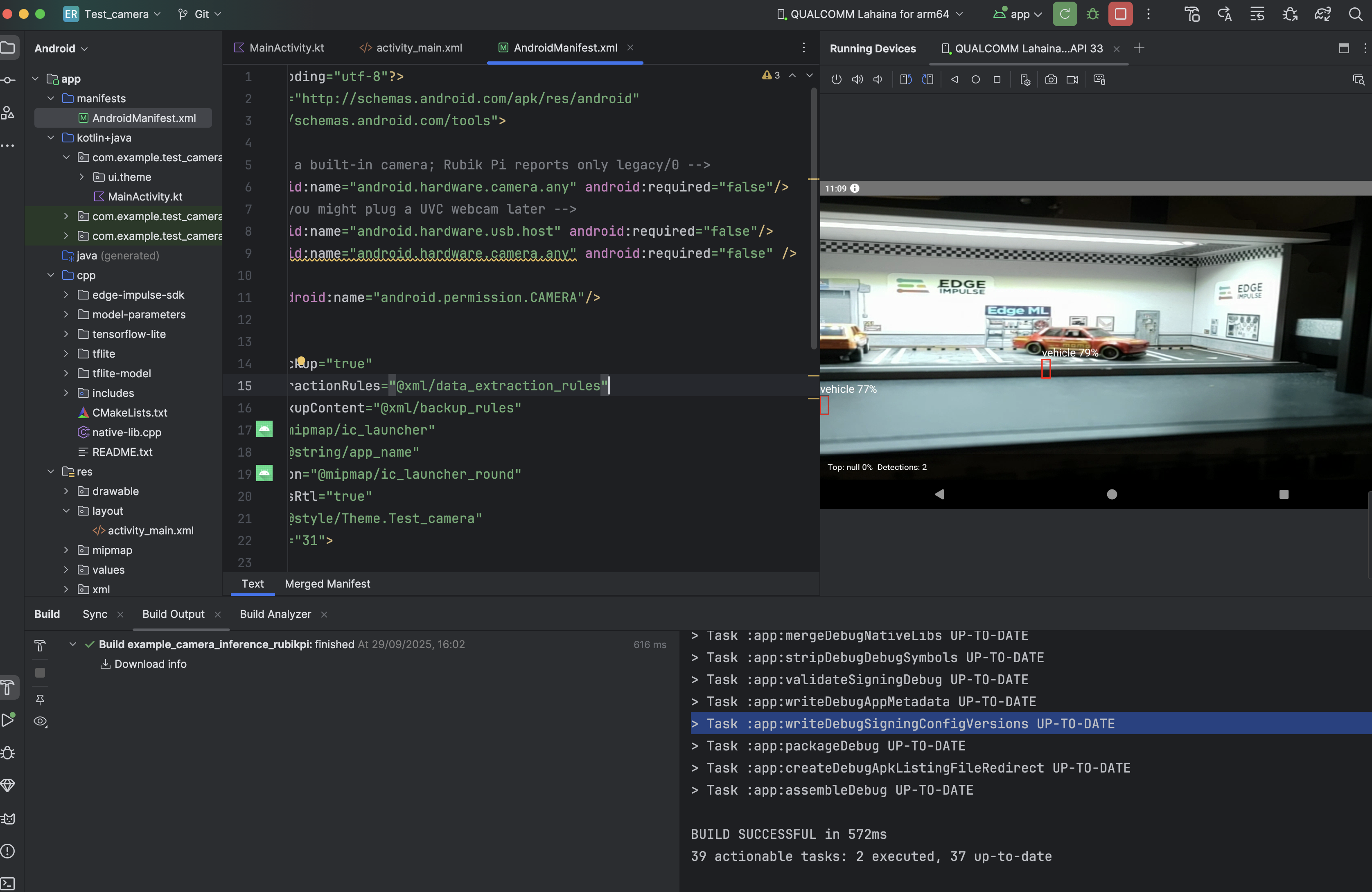
An Android app that captures camera frames in real time, runs on-device inference, and renders classification labels, object detection bounding boxes, or anomaly heatmap regions as a visual overlay.
## Prerequisites
Before starting, make sure you have:
* A trained vision model in Edge Impulse: image classification, object detection, or visual anomaly detection
* Android Studio with NDK 27.0.12077973 and CMake 3.22.1 installed
* An Android device with a camera running API 24 or later
## 1. Clone the repository
```bash theme={"system"}
git clone https://github.com/edgeimpulse/example-android-inferencing.git
cd example-android-inferencing/example_camera_inference
```
## 2. Download TensorFlow Lite libraries
```bash theme={"system"}
cd app/src/main/cpp/tensorflow-lite
# macOS/Linux
sh download_tflite_libs.sh
# Windows
download_tflite_libs.bat
```
## 3. Export your model
In Edge Impulse Studio:
1. Go to **Deployment**
2. Select **Android (C++ library)**
3. Enable **EON Compiler** (recommended: reduces memory and improves performance)
4. Click **Build** and download the `.zip`
## 4. Integrate the model
Extract the downloaded `.zip` and copy all files **except `CMakeLists.txt`** into the project:
```
app/src/main/cpp/
```
Your structure should look like this:
```
app/src/main/cpp/
├── edge-impulse-sdk/
├── model-parameters/
├── tflite-model/
├── tensorflow-lite/
├── native-lib.cpp
└── CMakeLists.txt ← keep the existing one
```
## 5. Build and run
1. Open the project in Android Studio
2. **Build → Make Project**
3. Connect your Android device
4. Run the app and grant the camera permission when prompted
Point the camera at objects and watch inference results appear as an overlay.
## How it works
Camera frames flow from CameraX into an `ImageAnalysis` use case, where they're converted to RGB and passed to the C++ classifier. Results come back as a structured object and are rendered by a custom overlay view.
### Camera setup
CameraX binds a preview stream and a frame analysis pipeline to the activity lifecycle. The `STRATEGY_KEEP_ONLY_LATEST` backpressure strategy drops frames the classifier isn't ready to process, keeping the preview smooth:
```kotlin theme={"system"}
// MainActivity.kt
private fun startCamera() {
val cameraProviderFuture = ProcessCameraProvider.getInstance(this)
cameraProviderFuture.addListener({
val cameraProvider = cameraProviderFuture.get()
val preview = Preview.Builder().build()
val imageAnalysis = ImageAnalysis.Builder()
.setBackpressureStrategy(ImageAnalysis.STRATEGY_KEEP_ONLY_LATEST)
.build()
imageAnalysis.setAnalyzer(cameraExecutor) { imageProxy ->
processImage(imageProxy)
}
cameraProvider.bindToLifecycle(this, cameraSelector, preview, imageAnalysis)
}, ContextCompat.getMainExecutor(this))
}
```
### Image processing
Each frame is converted to an RGB byte array on a background coroutine. The `ImageProxy` is closed immediately after reading to free the camera buffer:
```kotlin theme={"system"}
private fun processImage(imageProxy: ImageProxy) {
val bitmap = imageProxy.toBitmap()
val rgbBytes = bitmapToRGB(bitmap)
lifecycleScope.launch(Dispatchers.Default) {
val result = runInference(rgbBytes)
displayResults(result)
}
imageProxy.close()
}
```
### Native inference
The image data crosses the JNI boundary as a byte array and is fed into the Edge Impulse classifier as a signal:
```cpp theme={"system"}
// native-lib.cpp
extern "C" JNIEXPORT jobject JNICALL
Java_com_example_test_camera_MainActivity_runInference(
JNIEnv* env, jobject, jbyteArray imageData) {
signal_t signal;
signal.total_length = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_HEIGHT;
signal.get_data = &ei_camera_get_data;
ei_impulse_result_t result = {0};
run_classifier(&signal, &result, false);
return createResultObject(env, result);
}
```
### Bounding box overlay
For object detection, a custom `View` subclass draws bounding boxes and labels directly over the camera preview:
```kotlin theme={"system"}
class BoundingBoxOverlay : View {
var boundingBoxes: List = emptyList()
override fun onDraw(canvas: Canvas) {
boundingBoxes.forEach { box ->
val rect = Rect(box.x, box.y, box.x + box.width, box.y + box.height)
canvas.drawRect(rect, paint)
canvas.drawText("${box.label} ${box.confidence}", box.x.toFloat(), (box.y - 10).toFloat(), textPaint)
}
}
}
```
## Customization
### Adjust the confidence threshold
```kotlin theme={"system"}
companion object {
const val CONFIDENCE_THRESHOLD = 0.6f
}
private fun filterDetections(detections: List): List {
return detections.filter { it.confidence >= CONFIDENCE_THRESHOLD }
}
```
### Limit inference frequency
If the classifier is slower than the camera frame rate, you can throttle inference to run at a fixed interval:
```kotlin theme={"system"}
private var lastInferenceTime = 0L
private val inferenceInterval = 200L // ms
private fun processImage(imageProxy: ImageProxy) {
val now = System.currentTimeMillis()
if (now - lastInferenceTime >= inferenceInterval) {
runInference(imageProxy)
lastInferenceTime = now
}
imageProxy.close()
}
```
### Bounding box alignment
If bounding boxes appear offset from detected objects, scale them to match model and view dimensions:
```kotlin theme={"system"}
private fun scaleBoundingBox(
box: BoundingBox,
modelWidth: Int, modelHeight: Int,
viewWidth: Int, viewHeight: Int
): BoundingBox {
val scaleX = viewWidth.toFloat() / modelWidth
val scaleY = viewHeight.toFloat() / modelHeight
return box.copy(
x = (box.x * scaleX).toInt(),
y = (box.y * scaleY).toInt(),
width = (box.width * scaleX).toInt(),
height = (box.height * scaleY).toInt()
)
}
```
## Troubleshooting
* Reduce inference frequency (run every 200–300 ms instead of every frame)
* Lower the camera resolution via `setTargetResolution()`
* Verify XNNPACK is not disabled in CMakeLists
* Consider a smaller model architecture
* If confidence is consistently low, try lowering the threshold slightly
* Poor lighting is a common cause if the model wasn't trained on similar conditions
* Check that your camera resolution matches the model's input resolution; a large mismatch degrades accuracy
* Verify TFLite libraries were downloaded and are in `app/src/main/cpp/tensorflow-lite/`
* Confirm model files (`edge-impulse-sdk/`, `model-parameters/`, `tflite-model/`) are all present in `cpp/`
* Check that NDK and CMake versions match the prerequisites
## Next steps
* [QNN hardware acceleration](./qnn-acceleration)
* [Android series overview](./android-series)
## Resources
* [GitHub: example\_camera\_inference](https://github.com/edgeimpulse/example-android-inferencing/tree/main/example_camera_inference)
* [Image classification tutorial](/tutorials/end-to-end/image-classification)
* [Object detection tutorial](/tutorials/end-to-end/object-detection-bounding-boxes)
If you haven't been through the [Static buffer inference](./static-buffer-inference) example yet, start there. It covers the JNI bridge and inference loop without the added complexity of a camera pipeline.
## What you'll build
An Android app that captures camera frames in real time, runs on-device inference, and renders classification labels, object detection bounding boxes, or anomaly heatmap regions as a visual overlay.
## Prerequisites
Before starting, make sure you have:
* A trained vision model in Edge Impulse: image classification, object detection, or visual anomaly detection
* Android Studio with NDK 27.0.12077973 and CMake 3.22.1 installed
* An Android device with a camera running API 24 or later
## 1. Clone the repository
```bash theme={"system"}
git clone https://github.com/edgeimpulse/example-android-inferencing.git
cd example-android-inferencing/example_camera_inference
```
## 2. Download TensorFlow Lite libraries
```bash theme={"system"}
cd app/src/main/cpp/tensorflow-lite
# macOS/Linux
sh download_tflite_libs.sh
# Windows
download_tflite_libs.bat
```
## 3. Export your model
In Edge Impulse Studio:
1. Go to **Deployment**
2. Select **Android (C++ library)**
3. Enable **EON Compiler** (recommended: reduces memory and improves performance)
4. Click **Build** and download the `.zip`
## 4. Integrate the model
Extract the downloaded `.zip` and copy all files **except `CMakeLists.txt`** into the project:
```
app/src/main/cpp/
```
Your structure should look like this:
```
app/src/main/cpp/
├── edge-impulse-sdk/
├── model-parameters/
├── tflite-model/
├── tensorflow-lite/
├── native-lib.cpp
└── CMakeLists.txt ← keep the existing one
```
## 5. Build and run
1. Open the project in Android Studio
2. **Build → Make Project**
3. Connect your Android device
4. Run the app and grant the camera permission when prompted
Point the camera at objects and watch inference results appear as an overlay.
## How it works
Camera frames flow from CameraX into an `ImageAnalysis` use case, where they're converted to RGB and passed to the C++ classifier. Results come back as a structured object and are rendered by a custom overlay view.
### Camera setup
CameraX binds a preview stream and a frame analysis pipeline to the activity lifecycle. The `STRATEGY_KEEP_ONLY_LATEST` backpressure strategy drops frames the classifier isn't ready to process, keeping the preview smooth:
```kotlin theme={"system"}
// MainActivity.kt
private fun startCamera() {
val cameraProviderFuture = ProcessCameraProvider.getInstance(this)
cameraProviderFuture.addListener({
val cameraProvider = cameraProviderFuture.get()
val preview = Preview.Builder().build()
val imageAnalysis = ImageAnalysis.Builder()
.setBackpressureStrategy(ImageAnalysis.STRATEGY_KEEP_ONLY_LATEST)
.build()
imageAnalysis.setAnalyzer(cameraExecutor) { imageProxy ->
processImage(imageProxy)
}
cameraProvider.bindToLifecycle(this, cameraSelector, preview, imageAnalysis)
}, ContextCompat.getMainExecutor(this))
}
```
### Image processing
Each frame is converted to an RGB byte array on a background coroutine. The `ImageProxy` is closed immediately after reading to free the camera buffer:
```kotlin theme={"system"}
private fun processImage(imageProxy: ImageProxy) {
val bitmap = imageProxy.toBitmap()
val rgbBytes = bitmapToRGB(bitmap)
lifecycleScope.launch(Dispatchers.Default) {
val result = runInference(rgbBytes)
displayResults(result)
}
imageProxy.close()
}
```
### Native inference
The image data crosses the JNI boundary as a byte array and is fed into the Edge Impulse classifier as a signal:
```cpp theme={"system"}
// native-lib.cpp
extern "C" JNIEXPORT jobject JNICALL
Java_com_example_test_camera_MainActivity_runInference(
JNIEnv* env, jobject, jbyteArray imageData) {
signal_t signal;
signal.total_length = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_HEIGHT;
signal.get_data = &ei_camera_get_data;
ei_impulse_result_t result = {0};
run_classifier(&signal, &result, false);
return createResultObject(env, result);
}
```
### Bounding box overlay
For object detection, a custom `View` subclass draws bounding boxes and labels directly over the camera preview:
```kotlin theme={"system"}
class BoundingBoxOverlay : View {
var boundingBoxes: List = emptyList()
override fun onDraw(canvas: Canvas) {
boundingBoxes.forEach { box ->
val rect = Rect(box.x, box.y, box.x + box.width, box.y + box.height)
canvas.drawRect(rect, paint)
canvas.drawText("${box.label} ${box.confidence}", box.x.toFloat(), (box.y - 10).toFloat(), textPaint)
}
}
}
```
## Customization
### Adjust the confidence threshold
```kotlin theme={"system"}
companion object {
const val CONFIDENCE_THRESHOLD = 0.6f
}
private fun filterDetections(detections: List): List {
return detections.filter { it.confidence >= CONFIDENCE_THRESHOLD }
}
```
### Limit inference frequency
If the classifier is slower than the camera frame rate, you can throttle inference to run at a fixed interval:
```kotlin theme={"system"}
private var lastInferenceTime = 0L
private val inferenceInterval = 200L // ms
private fun processImage(imageProxy: ImageProxy) {
val now = System.currentTimeMillis()
if (now - lastInferenceTime >= inferenceInterval) {
runInference(imageProxy)
lastInferenceTime = now
}
imageProxy.close()
}
```
### Bounding box alignment
If bounding boxes appear offset from detected objects, scale them to match model and view dimensions:
```kotlin theme={"system"}
private fun scaleBoundingBox(
box: BoundingBox,
modelWidth: Int, modelHeight: Int,
viewWidth: Int, viewHeight: Int
): BoundingBox {
val scaleX = viewWidth.toFloat() / modelWidth
val scaleY = viewHeight.toFloat() / modelHeight
return box.copy(
x = (box.x * scaleX).toInt(),
y = (box.y * scaleY).toInt(),
width = (box.width * scaleX).toInt(),
height = (box.height * scaleY).toInt()
)
}
```
## Troubleshooting
* Reduce inference frequency (run every 200–300 ms instead of every frame)
* Lower the camera resolution via `setTargetResolution()`
* Verify XNNPACK is not disabled in CMakeLists
* Consider a smaller model architecture
* If confidence is consistently low, try lowering the threshold slightly
* Poor lighting is a common cause if the model wasn't trained on similar conditions
* Check that your camera resolution matches the model's input resolution; a large mismatch degrades accuracy
* Verify TFLite libraries were downloaded and are in `app/src/main/cpp/tensorflow-lite/`
* Confirm model files (`edge-impulse-sdk/`, `model-parameters/`, `tflite-model/`) are all present in `cpp/`
* Check that NDK and CMake versions match the prerequisites
## Next steps
* [QNN hardware acceleration](./qnn-acceleration)
* [Android series overview](./android-series)
## Resources
* [GitHub: example\_camera\_inference](https://github.com/edgeimpulse/example-android-inferencing/tree/main/example_camera_inference)
* [Image classification tutorial](/tutorials/end-to-end/image-classification)
* [Object detection tutorial](/tutorials/end-to-end/object-detection-bounding-boxes)